با توسعه سریع خانههای هوشمند، جاروبرقیهای رباتیک به یک وسیله استاندارد برای نظافت مدرن خانه تبدیل شدهاند. در میان اجزای اصلی متعدد جاروهای کف، موتورهای میکرو استپر به دلیل مزایای کنترل دقیق، سر و صدای کم و طول عمر طولانی، نقش بسیار مهمی ایفا میکنند. این مقاله به سناریوهای کاربردی خاص، مزایای فنی و نکات انتخاب موتورهای میکرو استپر در جاروهای کف خواهد پرداخت.

موتور پلهای مینیاتوری چیست؟
یک موتور میکرو استپر، محرکی است که سیگنالهای پالس الکتریکی را به جابجایی زاویهای یا خطی تبدیل میکند. برخلاف موتورهای DC معمولی، این موتور هر بار که سیگنال پالس دریافت میکند، روتور را با زاویه ثابتی (به نام زاویه پله) میچرخاند. این ویژگی «کنترل حلقه باز» به موتورهای میکرو استپر اجازه میدهد تا بدون نیاز به انکودر، به موقعیتیابی دقیقی دست یابند و این امر آنها را به ویژه برای دستگاههای هوشمندی مانند دستگاههای نظافت کف که به حجم و هزینه حساس هستند، مناسب میسازد.
چهار کاربرد اصلی موتورهای میکرو استپر در جاروهای کف

۱. هسته محرک سیستم ناوبری رادار لیزری (LDS)
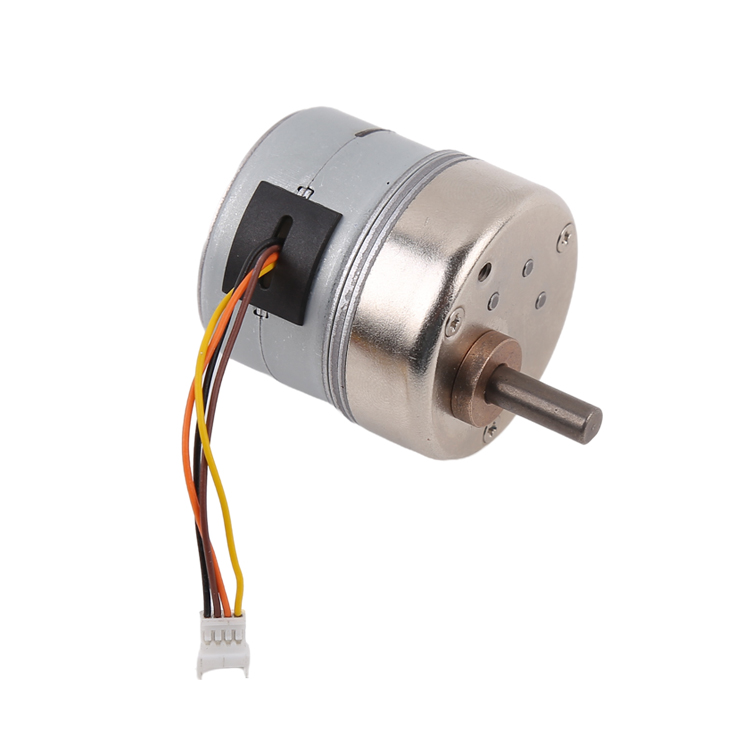
در حال حاضر، دستگاههای جاروب جریان اصلی از متوسط تا پیشرفته، همگی از فناوری ناوبری رادار لیزری استفاده میکنند. ماژولهای LDS برای اسکن محیط اطراف به چرخش با سرعت بالا (معمولاً 300-600 دور در دقیقه) نیاز دارند، در حالی که برای پایداری سرعت نیز الزامات بسیار بالایی دارند. موتورهای میکرو استپر به دلیل ویژگیهای زیر، انتخابی ایدهآل برای درایورهای LDS هستند:
کنترل دقیق سرعت:با تنظیم فرکانس پالس، سرعت را میتوان دقیقاً کنترل کرد تا از یکنواختی جمعآوری دادههای ابر نقطهای اطمینان حاصل شود.
ویژگیهای ارتعاش کم:در مقایسه با موتورهای براش، موتورهای پلهای روانتر کار میکنند و تداخل با ماژولهای فاصلهیابی لیزری را کاهش میدهند.
طول عمر بالا:طراحی بدون سایش برس الکتریکی، طول عمر کلی دستگاه میتواند به هزاران ساعت برسد.
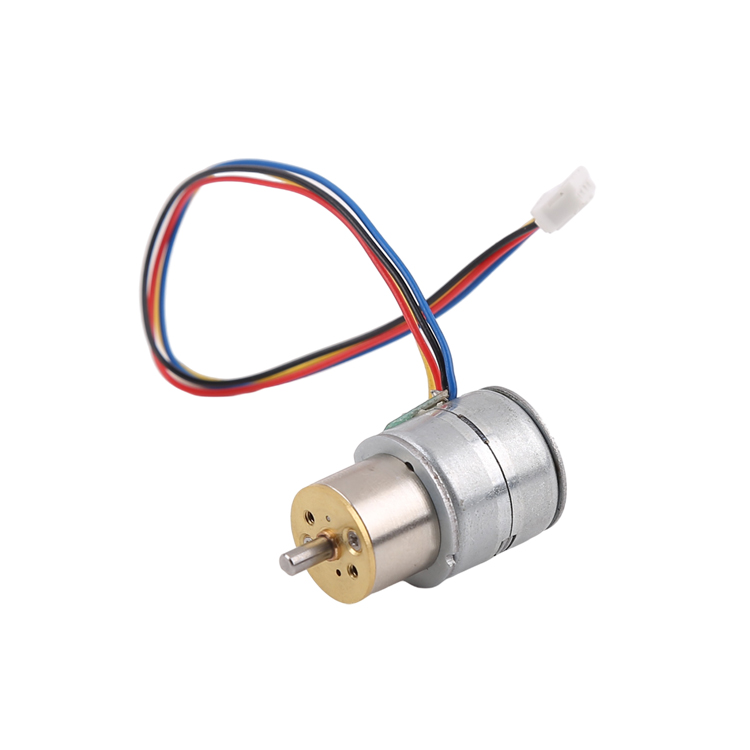
در کاربردهای عملی، ماژولهای LDS اغلب از موتورهای میکرو استپر آهنربای دائمی با قطر ۲۵ میلیمتر، همراه با الگوریتمهای رانندگی حلقه بسته، برای حفظ سطح نویز پایین (معمولاً زیر ۴۰ دسیبل) در حین چرخش با سرعت بالا استفاده میکنند.
۲. تنظیم بلند کردن و سرعت برس جانبی دستگاه جارو
برس لبه پایینی دستگاه جارو برقی وظیفه جارو کردن زبالههای گوشه دیوارها و لبههای مبلمان را به محدوده اصلی برسها بر عهده دارد. طرحهای سنتی از موتورهای DC معمولی برای چرخاندن برس لبه استفاده میکنند، اما نمیتوانند ارتفاع برس لبه را کنترل کنند. پس از معرفی موتورهای میکرو استپر، میتوان به موارد زیر دست یافت:
بلند کردن تطبیقی: هنگامی که دستگاه جارو فرش یا آستانه را تشخیص میدهد، موتور پلهای به طور دقیق برس لبه را کنترل میکند تا ۵ تا ۸ میلیمتر بلند شود و از گیر کردن جلوگیری شود.
تنظیم سرعت چندگانه:به طور خودکار بین سرعتهای ۲۰۰ تا ۴۰۰ دور در دقیقه برای جنسهای مختلف کف مانند کفپوش چوبی، کاشی، فرش و غیره تغییر میکند.
محافظت در برابر برگشت مقاومت:با تشخیص حالت خارج از گام موتور پلهای، هنگامی که برس لبه با مقاومت مواجه میشود، معکوسسازی هوشمند انجام میشود.
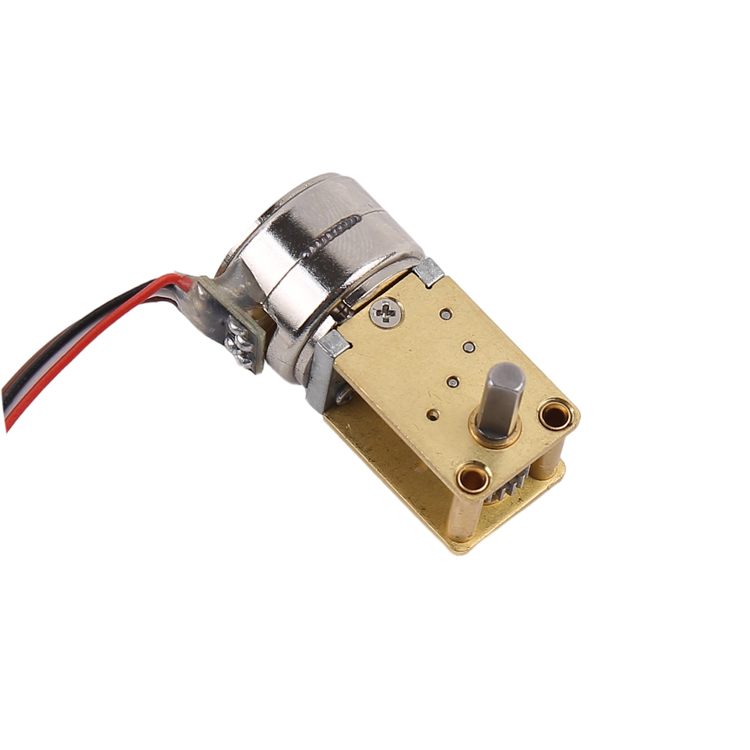
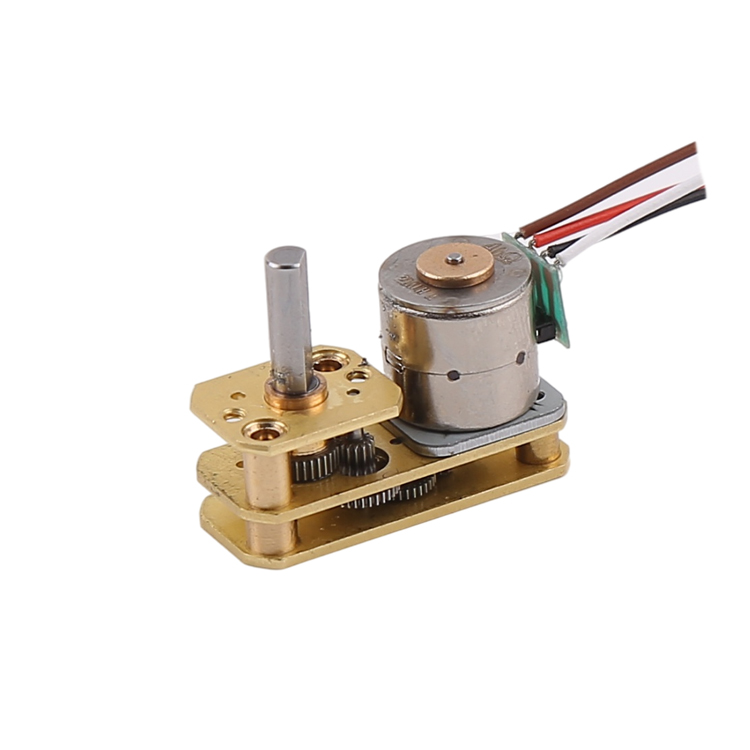
این کاربرد معمولاً از یک موتور پلهای کوچک، همراه با یک مکانیزم پیچشی برای دستیابی به حرکت خطی استفاده میکند.
۳. کنترل دقیق دمپر فن
نیروی مکش یک دستگاه جارو برقی نه تنها به سرعت فن بستگی دارد، بلکه ارتباط نزدیکی با وضعیت باز و بسته شدن مجرای هوا نیز دارد. برخی از مدلهای رده بالا از موتورهای میکرو استپر برای کنترل دریچه هوا استفاده میکنند:
مکش قابل تنظیم بدون پله:از مکش ضعیف در حالت بیصدا تا مکش قوی در حالت قدرتمند، به صورت خطی قابل تنظیم
آب بندی جعبه گرد و غبار:هنگام خاموش شدن، موتور پلهای بافل را به حرکت در میآورد تا مجرای هوا را کاملاً ببندد و از بازگشت گرد و غبار جلوگیری کند.
بهینهسازی مصرف انرژی:کنترل دقیق باز شدن دریچه هوا برای کاهش بار فن در مواقعی که مکش زیاد مورد نیاز نیست
در این سناریوی کاربردی، توانایی میکرواستپ موتورها در حفظ گشتاور از اهمیت ویژهای برخوردار است، زیرا آنها میتوانند موقعیت بافل را حتی در صورت قطع برق حفظ کنند.
۴. ماژول بالابر و ارتعاش یدککش
در سالهای اخیر، موتورهای میکرو استپر نیز نقش مهمی در دستگاههای اسکن و تیکشی همهکاره محبوب داشتهاند.
مکانیزم بلند کردن تی:وقتی فرش شناسایی شد، موتور پلهای، پایه تی را به اندازه ۱۰ تا ۱۲ میلیمتر بالا میبرد تا از خیس شدن فرش جلوگیری شود.
لرزش دست مصنوعی هنگام پاک کردن:با تغییر سریع چرخش موتور پلهای بین جلو و عقب، تی میتواند به ارتعاش رفت و برگشتی افقی دست یابد و اثر تمیز کردن لکههای سرسخت را بهبود بخشد.
تنظیم فشار پایین:فشار تی را روی زمین با توجه به جنس زمین (معمولاً در محدوده ۵ تا ۱۵ نیوتن) به طور دقیق کنترل کنید.
مزایای موتورهای میکرو استپر در مقایسه با سایر موتورها
پروژه مقایسه: موتور میکرو استپر، موتور DC براشلس، موتور DC براشلس
دقت موقعیتیابی بالا (حلقه باز) نیاز به انکودر دارد
کنترل پیچیدگی، ساده، سرراست و پیچیده است
گشتاور عالی در سرعت پایین، عموماً ضعیف
میزان صدای کم، متوسط، زیاد و کم
هزینه متوسط رو به بالا
عمر طولانی، کوتاه، زیاد
| پروژه مقایسه: | موتور میکرو استپر | موتور براشلس دی سی | موتور بدون جاروبک دی سی |
| دقت موقعیت یابی | بالا (حلقه باز)
| رمزگذار مورد نیاز است
| رمزگذار مورد نیاز است
|
| پیچیدگی کنترل | ساده
| ساده
| پیچیده |
| گشتاور سرعت پایین | عالی
| عمومی | فقیر
|
| سطح سر و صدا | کم | وسط بالا
| کم |
| هزینه | متوسط | کم | قد بلند |
| طول عمر | طولانی | کوتاه | طولانی |
برای جاروهای کف، موتورهای میکرو استپر کنترل موقعیت دقیقی را بدون نیاز به بازخورد حلقه بسته ارائه میدهند که مزیت غیرقابل جایگزینی در مکانیسمهای ناوبری و بالابری LDS دارد.
نکات کلیدی برای انتخاب موتورهای میکرو استپر برای جاروهای کف

هنگام توسعه محصولات ماشینهای جارو، انتخاب موتورهای میکرو استپر باید به پارامترهای زیر توجه کند:
ابعاد خارجی:معمولاً 20 میلیمتر، 25 میلیمتر، 28 میلیمتر مربع، باید با فضای داخلی محصول مطابقت داشته باشد
گشتاور را حفظ کنید:کاربردهای LDS به 0.1 نیوتن متر یا بیشتر نیاز دارند و مکانیسمهای بالابر به 0.2-0.3 نیوتن متر نیاز دارند.
جریان نامی:معمولاً 0.5-1.0A، با در نظر گرفتن قابلیت تراشه درایو
زاویه گام:۱.۸ درجه برای LDS مناسب است، ۰.۹ درجه برای مکانیسمهای بالابری که نیاز به کنترل دقیقتری دارند مناسب است.
دمای کار:دمای داخلی دستگاه جارو میتواند به ۶۰ درجه سانتیگراد برسد و باید موتوری با مقاومت دمایی ۱۰۰ درجه سانتیگراد یا بیشتر انتخاب شود.
سوالات متداول
س: آیا موتورهای میکرو استپر به راحتی در جاروهای کف از پله خارج میشوند؟
الف) تا زمانی که گشتاور بار از ۷۰٪ گشتاور نگهدارنده تجاوز نکند و منحنی شتابگیری و کاهش سرعت مناسبی تنظیم شده باشد، افت پله بسیار نادر است. مدلهای رده بالا از درایو پلهای حلقه بسته برای نظارت بر موقعیت روتور در زمان واقعی استفاده میکنند.
س: آیا موتور میکرو استپر برق مصرف میکند؟
الف) در مقایسه با فنها و موتورهای براش اصلی، موتورهای پلهای مصرف برق بسیار کمی دارند (معمولاً ۱-۳ وات). با این حال، باید توجه داشت که موتور پلهای در حین حفظ موقعیت، همچنان جریان مصرف میکند و طراحی باید از نگه داشتن حالت بار برای مدت طولانی جلوگیری کند.
س: چگونه صدای موتورهای پلهای را کاهش دهیم؟
الف) اتخاذ فناوری رانندگی قطعهبندیشده، بهینهسازی منحنیهای شتابگیری و کاهش سرعت، و افزودن پدهای لاستیکی جاذب ضربه به محفظه موتور میتواند به طور مؤثری نویز عملیاتی را کاهش دهد.
روندهای توسعه آینده
با توسعه جاروبرقیها به سمت هوشمندتر، بیصداتر و باریکتر شدن، فناوری موتور میکرو استپر نیز دائماً در حال تکامل است:
درایور یکپارچه:تراشه درایور را با موتور در یک بسته واحد ادغام کنید تا فضای اشغال شده توسط PCB کاهش یابد.
فناوری بیصدا:اتخاذ طراحی مدار مغناطیسی جدید و مواد دنده انعطافپذیر برای کاهش بیشتر نویز عملیاتی
موتور فوق العاده نازک:ارتفاع را میتوان تا 12 میلیمتر فشرده کرد، که برای طراحی دستگاه جاروی فوقالعاده نازک مناسب است
نتیجهگیری
اگرچه میکرو استپر موتور کوچک است، اما یک جزء کلیدی برای دستیابی به ناوبری دقیق، اجتناب هوشمند از موانع و تمیز کردن تطبیقی در جاروهای کف است. برای مهندسان تحقیق و توسعه جاروبرقی، درک عمیق از ویژگیهای کاری و روشهای انتخاب میکرو استپر موتورها میتواند به طراحی محصولاتی با عملکرد بهتر و قابلیت اطمینان بالاتر کمک کند. با محبوبیت رباتهای خدمات خانگی، سناریوهای کاربردی میکرو استپر موتورها بیشتر گسترش خواهد یافت و به یک پایه کنترل حرکت ضروری برای پلتفرمهای هوشمند موبایل تبدیل میشود.
اگر در حال توسعه یک محصول ماشین جارو برقی هستید، لطفاً برای دریافت راهحلهای سفارشی متناسب با شرایط کاری خاص، با یک تأمینکننده حرفهای موتور پلهای مشورت کنید.
زمان ارسال: 20 آوریل 2026