هنگام طراحی تجهیزات با استفاده از موتورها، البته لازم است که مناسب ترین موتور برای کار مورد نیاز انتخاب شود.این مقاله به مقایسه ویژگی ها، عملکرد و ویژگی های موتور براش، استپ موتور و موتور براشلس می پردازد، امید است در هنگام انتخاب موتور مرجعی برای همه باشد.با این حال، از آنجایی که مشخصات زیادی در دسته موتورهای مشابه وجود دارد، لطفاً از آنها فقط برای مرجع استفاده کنید.در نهایت لازم است اطلاعات دقیق از طریق مشخصات فنی هر موتور تایید شود.
ویژگی های موتور کوچک: جدول زیر به طور خلاصه ویژگی های موتور پله ای، موتور براش و موتور براشلس را نشان می دهد.
| موتور پله ای | موتور برس خورده | موتور بدون جارو | |
| روش چرخش | مدار محرک برای تعیین ترتیب هر فاز (شامل دو فاز، سه فاز و پنج فاز) سیم پیچ آرمیچر استفاده می شود.
| جریان آرمیچر از طریق مکانیسم یکسو کننده تماس کشویی برس و کموتاتور سوئیچ می شود. | Brushless با جایگزینی برس و کموتاتور با سنسور موقعیت قطب مغناطیسی و سوئیچ نیمه هادی محقق می شود.
|
| مدار درایو | نیاز | ناخواسته | نیاز |
| گشتاور | گشتاور نسبتاً زیاد است.(به خصوص گشتاور در سرعت پایین)
| گشتاور راه اندازی زیاد است و گشتاور متناسب با جریان آرمیچر است.(گشتاور در سرعت متوسط به بالا نسبتا زیاد است) | |
| سرعت دوران | گشتاور نسبتاً زیاد است.(به خصوص گشتاور در سرعت پایین)
| متناسب با ولتاژ اعمال شده به آرمیچر است.سرعت با افزایش گشتاور بار کاهش می یابد | |
| چرخش با سرعت بالا | متناسب با فرکانس پالس ورودی است.خارج از محدوده گام در محدوده سرعت کم، چرخش با سرعت بالا دشوار است (نیاز به کاهش سرعت دارد) | با توجه به محدودیت مکانیزم یکسو کننده برس و کموتاتور، حداکثر سرعت می تواند به چندین هزار دور در دقیقه برسد. | تا هزاران تا ده ها هزار دور در دقیقه
|
| عمر چرخشی | با تحمل زندگی تعیین می شود.ده ها هزار ساعت
| محدود به سایش برس و کموتاتور.صدها تا هزاران ساعت
| با تحمل زندگی تعیین می شود.ده ها هزار تا صدها هزار ساعت
|
| روش های چرخش رو به جلو و معکوس | تغییر توالی فازهای تحریک مدار محرک ضروری است
| قطبیت ولتاژ پین را معکوس کنید
| تغییر توالی فازهای تحریک مدار محرک ضروری است
|
| قابلیت کنترل | کنترل حلقه باز سرعت چرخش و موقعیت (مقدار چرخش) تعیین شده توسط پالس فرمان قابل انجام است (اما مشکل خارج از مرحله وجود دارد) | چرخش سرعت ثابت نیاز به کنترل سرعت دارد (کنترل بازخورد با استفاده از سنسورهای سرعت).از آنجایی که گشتاور متناسب با جریان است، کنترل گشتاور آسان است | |
| چقدر راحت بدست میاد | آسان: انواع زیادی وجود دارد | آسان: بسیاری از تولید کنندگان و انواع، گزینه های بسیاری
| مشکلات: عمدتاً موتورهای ویژه برای کاربردهای خاص |
| قیمت | اگر مدار درایور گنجانده شود، قیمت آن گران است.ارزان تر از موتور براشلس
| موتور بدون هسته نسبتا ارزان به دلیل ارتقاء آهنربا کمی گران است. | اگر مدار درایور گنجانده شود، قیمت آن گران است.
|
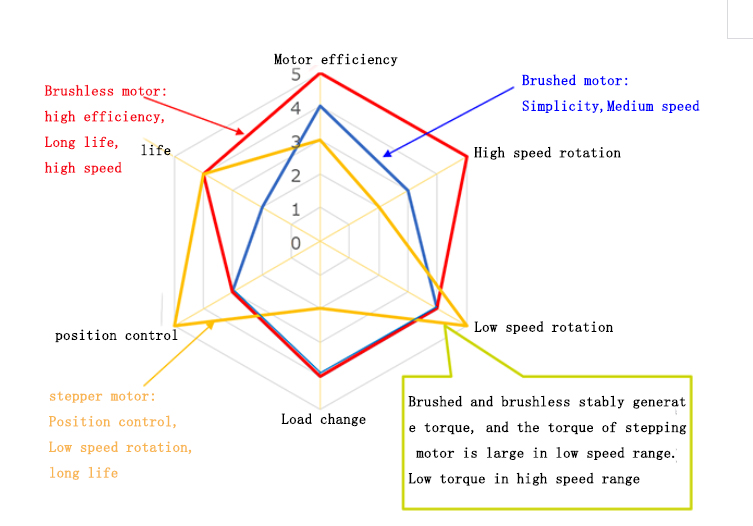
مقایسه عملکرد میکرو موتورها: نمودار رادار مقایسه عملکرد موتورهای کوچک مختلف را فهرست می کند.
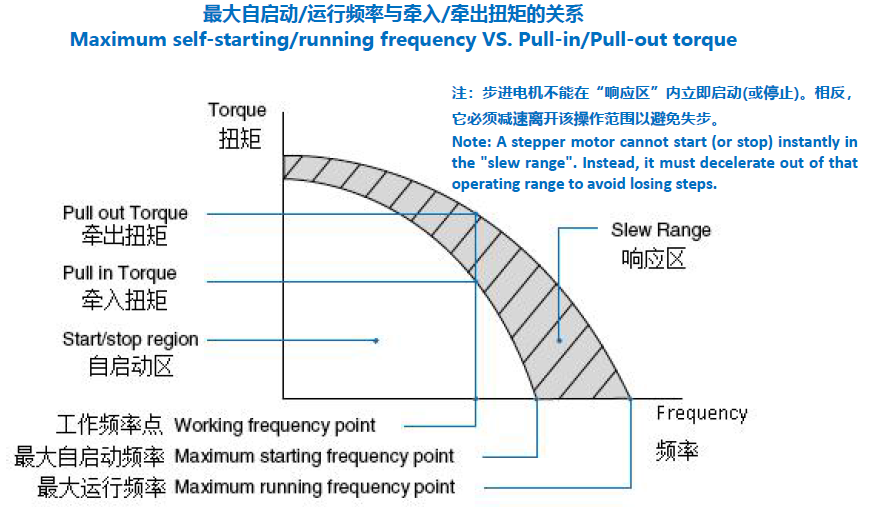
مشخصات گشتاور سرعت موتور پله ای میکرو: مرجع محدوده کاری (درایو جریان ثابت)
● عملکرد پیوسته (امتیاز): حدود 30 درصد از گشتاور را در ناحیه خود راه انداز و خارج از ناحیه پله نگه دارید.
● عملکرد کوتاه مدت (رده بندی زمان کوتاه): گشتاور را در محدوده حدود 50٪ تا 60٪ در ناحیه خود راه اندازی و خارج از منطقه نگه دارید.
● افزایش دما: الزامات درجه عایق موتور را در محدوده بار و محیط سرویس بالا برآورده کنید
خلاصه نکات کلیدی:
1) هنگام انتخاب موتورهایی مانند موتور براش، استپ موتور و موتور بدون جاروبک، می توان از ویژگی ها، عملکرد و نتایج مقایسه مشخصه موتورهای کوچک به عنوان مرجعی برای انتخاب موتور استفاده کرد.
2) هنگام انتخاب موتورهایی مانند موتور براش، استپ موتور و موتور براشلس، موتورهای هم رده شامل مشخصات متعددی می شوند، بنابراین نتایج مقایسه مشخصات، عملکرد و ویژگی های موتورهای کوچک فقط برای مرجع است.
3) هنگام انتخاب موتورهایی مانند موتور براش، استپ موتور و موتور براشلس، اطلاعات دقیق باید از طریق مشخصات فنی هر موتور تایید شود.
زمان ارسال: ژانویه-04-2023