۱ چیست؟نماموتور پلهای?
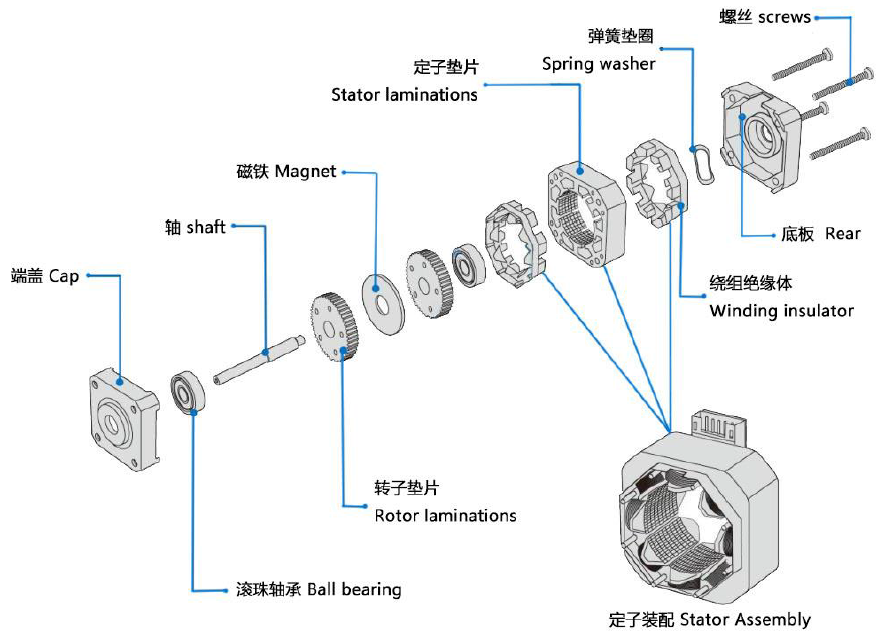
موتور پلهای نوعی موتور کنترل دیجیتال است که به طور گسترده در تجهیزات مختلف اتوماتیک مورد استفاده قرار میگیرد.نما موتور پلهاییک موتور پلهای است که با ترکیب مزایای نوع آهنربای دائمی و نوع واکنشی طراحی شده است. ساختار آن مشابه موتور پلهای واکنشی است. روتور در جهت محوری به دو بخش تقسیم میشود. دو بخش هسته آهنی به طور مساوی با تعداد و اندازه دندانههای کوچک در جهت محیطی توزیع شدهاند، اما با گام نصف دندانه، به صورت پلکانی قرار گرفتهاند.
۲ اصل کارنماموتور پلهای
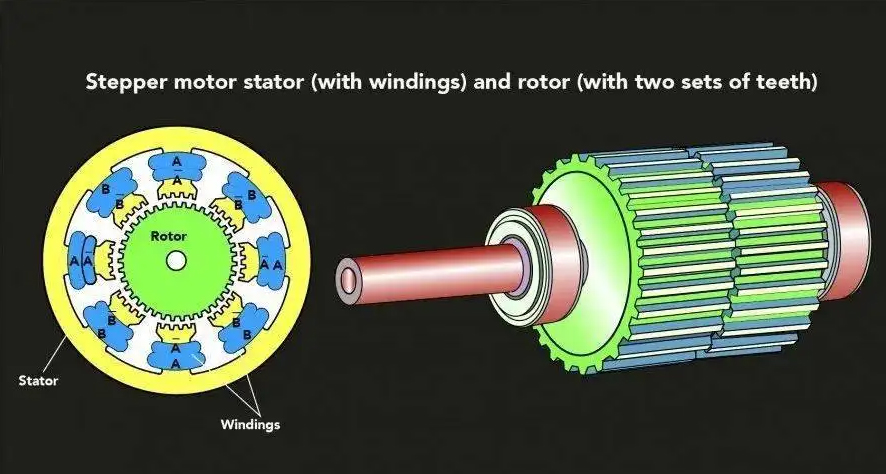
ساختار موتور پلهای NEMA مشابه موتور رلوکتانسی است که آن هم از استاتور و روتور تشکیل شده است. استاتور معمولی دارای ۸ قطب یا ۴ قطب است. تعداد مشخصی دندانه کوچک به طور یکنواخت روی سطح قطب توزیع شدهاند. سیمپیچ روی قطب میتواند در دو جهت انرژی بگیرد تا فاز a و فاز a و فاز b و فاز b را تشکیل دهد.
تمام دندانههای روی یک بخش از پرههای روتور، قطبیت یکسانی دارند، در حالی که قطبیت دو پره روتور در بخشهای مختلف، مخالف یکدیگر است. بزرگترین تفاوت بین موتور پلهای NEMA و موتور پلهای واکنشی این است که وقتی ماده مغناطیسی دائمی مغناطیسی شده، مغناطیسزدایی میشود، نقاط نوسان و نواحی خارج از گام وجود خواهد داشت.
۳ مزیتنماموتور پلهای
روتور موتور پلهای NEMA مغناطیسی است، بنابراین گشتاور تولید شده تحت جریان استاتور یکسان بیشتر از موتور پلهای واکنشی است و زاویه پله معمولاً کوچک است. در عین حال، با افزایش تعداد فازها (تعداد سیمپیچهای برقدار)، زاویه پله موتور پلهای NEMA کاهش مییابد و دقت بهبود مییابد. این نوع موتور پلهای بیشترین کاربرد را دارد.
مزایای استفاده ازنماموتور پلهای:
۱. هنگامی که تعداد جفت قطبها با تعداد دندانههای روتور برابر باشد، میتوان تغییر آن را طبق نیاز تنظیم کرد.
۲. اندوکتانس سیمپیچ با تغییر موقعیت روتور، تغییرات کمی دارد که دستیابی به کنترل بهینه عملکرد را آسان میکند.
۳. هنگامی که از مواد مغناطیسی دائمی جدید با انرژی مغناطیسی بالا در مدار مغناطیسی مغناطیسی محوری استفاده میشود، عملکرد موتور میتواند بهبود یابد.
۴. روتور میتواند تحریک فولاد مغناطیسی را فراهم کند.
۴ زمینههای کاربردینماموتور پلهای

زمان ارسال: 30 ژانویه 2023