با توجه به اینکه سلامت و ایمنی عمومی در زندگی روزمره ما از اولویت بالایی برخوردار است، قفلهای درب اتوماتیک به طور فزایندهای محبوب میشوند و این قفلها باید کنترل حرکتی پیشرفتهای داشته باشند. دقت مینیاتوریموتورهای پلهایراه حل ایده آلی برای این طراحی جمع و جور و پیچیده هستند. اتوماتیکقفل درهامدتی است که وجود دارند و در ابتدا در مناطق تجاری هتلها و دفاتر شروع به کار کردند. با افزایش تعداد کاربران تلفنهای هوشمند و گسترش فناوری خانههای هوشمند، سیستمهای اتوماسیون مسکونی نیز...کاربردهای قفل دربهمچنین محبوبیت پیدا کردهاند. تفاوتهای فنی بین کاربران تجاری و مسکونی وجود دارد، مانند استفاده از باتری در مقابل اتصال الکترونیکی و فناوری RFID در مقابل بلوتوث.

قفل سنتی برای قفل کردن/باز کردن قفل، نیاز به قرار دادن کلید در سیلندر قفل با چرخاندن دستی آن دارد. مزیت این روش این است که کاملاً ایمن است. افراد ممکن است کلیدها را گم کنند یا جا بگذارند و فرآیند تعویض قفل/کلید نیاز به استفاده از ابزار و تخصص دارد. قفلهای الکترونیکی از نظر کنترل دسترسی انعطافپذیرتر هستند و اغلب میتوان آنها را به راحتی از طریق نرمافزار اصلاح و بهروزرسانی کرد. بسیاری از قفلهای الکترونیکی هم گزینههای کنترل قفل دستی و هم الکترونیکی را ارائه میدهند که راهحل قویتری را ارائه میدهد.
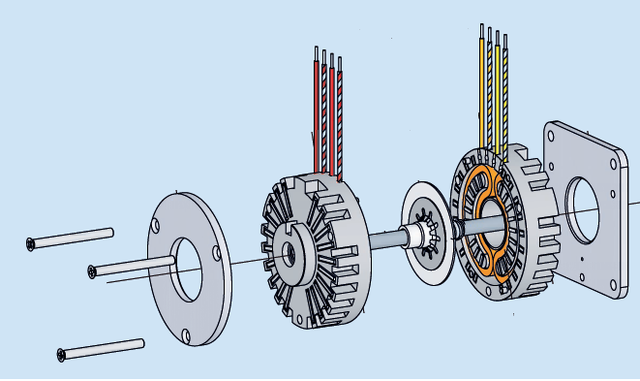
موتورهای پلهای با قطر کوچک برای قفلهای الکترونیکی فشرده، برای راهحلهایی با محدودیتهای اندازه و موقعیتیابی دقیق ایدهآل هستند. مهندسی موتور و فناوریهای اختصاصی مغناطیسسازی، توسعه موتورهای پلهای با کمترین قطر موجود در حال حاضر (قطر خارجی ۳.۴ میلیمتر) را هدایت کردهاند. تکنیکهای پیشرفته تحلیل مغناطیسی و ساختاری برای بهینهسازی طراحی و مواد برای فضای محدود موجود استفاده میشوند. یکی از مهمترین تصمیمات برای موتورهای پلهای مینیاتوری، طول گام موتور است که به وضوح خاص بستگی دارد. رایجترین طول گامها ۷.۵ درجه و ۳.۶ درجه هستند که به ترتیب معادل ۴۸ و ۱۰۰ گام در هر دور هستند، و موتورهای پلهای دارای زاویه گام ۱۸ درجه هستند. با یک درایو پله کامل (تحریک فاز ۲-۲)، موتور ۲۰ گام در هر دور میچرخد و گام معمول پیچ ۰.۴ میلیمتر است، بنابراین میتوان به دقت کنترل موقعیت ۰.۰۲ میلیمتر دست یافت.

موتورهای پلهای میتوانند یک کاهنده دنده داشته باشند که زاویه گام کوچکتری را فراهم میکند و یک چرخ دنده کاهنده که گشتاور موجود را افزایش میدهد. برای حرکت خطی، موتورهای پلهای از طریق مهره به پیچ متصل میشوند (این موتورها محرک خطی نیز نامیده میشوند). اگر قفل الکترونیکی از یک کاهنده دنده استفاده کند، پیچ را میتوان با دقت حتی با شیب زیاد حرکت داد.
بخش ورودی منبع تغذیه موتور پلهای میتواند اشکال مختلفی داشته باشد، مانند کانکتورهای FPC، ترمینالهای کانکتور میتوانند مستقیماً به PCB جوش داده شوند، میله فشاری بخش خروجی میتواند یک کشویی پلاستیکی یا یک کشویی فلزی باشد و طیف خاصی از کشوییهای سفارشی با توجه به نیازهای حرکتی قفل وجود دارد. به دلیل موتور پلهای کوچک و پیچهای نازک، طول رزوه پردازش شده محدود است و حداکثر حرکت قفل عموماً کمتر از 50 میلیمتر است. معمولاً موتور پلهای نیروی رانشی حدود 150 تا 300 گرم دارد. نیروی رانش بسته به ولتاژ درایو، مقاومت موتور و غیره متفاوت است.
نتیجهگیری
با توجه به علاقه مصرفکنندگان به محصولات کمحاشیه و ساده، موتورهای پلهای مینیاتوری میتوانند این اندازه کوچک را در خود جای دهند. علاوه بر فرم جمعوجور، کنترل موتورهای پلهای آسانتر است، بهویژه برای موقعیتیابی دقیق و الزامات گشتاور سرعت پایین مانند قفل خودکار. برای دستیابی به همین عملکرد، سایر فناوریهای موتور نیاز به افزودن حسگرهای اثر هال یا مکانیسمهای کنترل بازخورد موقعیت پیچیده دارند. موتورهای پلهای را میتوان با میکروکنترلرهای ساده هدایت کرد، که میتواند مهندسان طراح را از نگرانیهای مربوط به راهحلهای بیش از حد پیچیده رهایی بخشد.
زمان ارسال: ۲۵ نوامبر ۲۰۲۲