حلقه بستهموتورهای پلهاینسبت عملکرد به هزینه را در بسیاری از کاربردهای کنترل حرکت تغییر دادهاند. موفقیت موتورهای پیشرونده حلقه بسته VIC همچنین امکان جایگزینی سروو موتورهای گرانقیمت را با سروو موتورهای کمهزینه فراهم کرده است.موتورهای پلهایدر تعداد فزایندهای از کاربردهای اتوماسیون صنعتی با استاندارد بالا، پیشرفتهای تکنولوژیکی نسبت عملکرد به هزینه بین موتورهای پلهای و سروو موتورها را تغییر میدهند.
موتورهای پلهای در مقابل موتورهای سروو
طبق عقل سلیم، سیستمهای کنترل سروو در کاربردهایی که سرعت بیش از ۸۰۰ دور در دقیقه و پاسخ دینامیکی بالا مورد نیاز است، عملکرد بهتری دارند. موتورهای پلهای برای کاربردهایی با سرعت پایینتر، شتاب کم تا متوسط و گشتاور نگهدارنده بالا مناسبتر هستند.
بنابراین اساس این باور رایج در مورد موتورهای پلهای و سروو موتورها چیست؟ بیایید آن را با جزئیات بیشتری در زیر بررسی کنیم.
۱. سادگی و هزینه
موتورهای پلهای نه تنها ارزانتر از موتورهای سروو هستند، بلکه راهاندازی و نگهداری آنها نیز سادهتر است. موتورهای پلهای در حالت سکون پایدار هستند و موقعیت خود را (حتی با بارهای دینامیکی) حفظ میکنند. با این حال، اگر برای کاربردهای خاص به عملکرد بالاتری نیاز باشد، باید از موتورهای سروو گرانتر و پیچیدهتری استفاده شود.
۲. ساختار
موتورهای پلهایبه صورت پلهای میچرخند و از سیمپیچهای مغناطیسی برای کشیدن تدریجی یک آهنربا از یک موقعیت به موقعیت بعدی استفاده میکنند. برای حرکت ۱۰۰ موقعیت موتور در هر جهت، مدار نیاز به انجام ۱۰۰ عملیات پلهای روی موتور دارد. موتورهای پلهای از پالسها برای دستیابی به حرکات افزایشی استفاده میکنند و امکان موقعیتیابی دقیق را بدون استفاده از هیچ حسگر بازخوردی فراهم میکنند.
روش حرکت سروو موتور متفاوت است. این موتور یک حسگر موقعیت - یعنی یک انکودر - را به روتور مغناطیسی متصل میکند و به طور مداوم موقعیت دقیق موتور را تشخیص میدهد. سروو اختلاف بین موقعیت واقعی موتور و موقعیت فرمان داده شده را رصد میکند و جریان را بر اساس آن تنظیم میکند. این سیستم حلقه بسته، موتور را در حالت صحیح حرکت نگه میدارد.

۳. سرعت و گشتاور
تفاوت عملکرد بین موتورهای پلهای و سروو موتورها ناشی از راهحلهای مختلف طراحی موتور آنهاست.موتورهای پلهایتعداد قطبهای آنها بسیار بیشتر از سروو موتورها است، بنابراین یک دور کامل موتور پلهای نیاز به تبادل جریان سیمپیچهای بسیار بیشتری دارد که منجر به افت سریع گشتاور در سرعتهای بالا میشود. علاوه بر این، اگر به حداکثر گشتاور برسد، موتور پلهای ممکن است عملکرد همگامسازی سرعت خود را از دست بدهد. به همین دلایل، موتورهای سروو در اکثر کاربردهای سرعت بالا راهحل ترجیحی هستند. در مقابل، تعداد قطبهای بیشتر یک موتور پلهای در سرعتهای پایینتر، زمانی که موتور پلهای نسبت به یک موتور سروو با اندازه مشابه، مزیت گشتاور دارد، مزیت محسوب میشود.
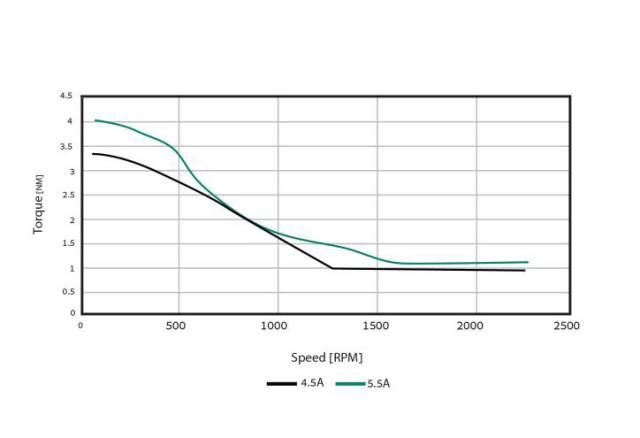
با افزایش سرعت، گشتاور موتور پلهای کاهش مییابد
۴. موقعیتیابی
تفاوتهای مهمی بین موتورهای پلهای و موتورهای سروو در کاربردهایی وجود دارد که در آنها موقعیت دقیق دستگاه باید همیشه مشخص باشد. در کاربردهای حرکت حلقه باز که توسط موتورهای پلهای کنترل میشوند، سیستم کنترل فرض میکند که موتور همیشه در حالت صحیح حرکت است. با این حال، پس از بروز مشکل، مانند توقف موتور به دلیل گیر کردن یک قطعه، کنترلکننده قادر به دانستن موقعیت واقعی دستگاه نیست، که میتواند منجر به از دست دادن موقعیت شود. سیستم حلقه بسته خود موتور سروو یک مزیت دارد: اگر توسط یک جسم گیر کند، بلافاصله آن را تشخیص میدهد. دستگاه از کار میافتد و هرگز از موقعیت خود خارج نمیشود.
۵. گرما و مصرف انرژی
موتورهای پلهای حلقه باز از جریان ثابتی استفاده میکنند و گرمای زیادی تولید میکنند. کنترل حلقه بسته فقط جریان مورد نیاز برای حلقه سرعت را فراهم میکند و بنابراین از مشکل گرم شدن موتور جلوگیری میکند.
خلاصه مقایسه
سیستمهای کنترل سروو برای کاربردهای پرسرعت شامل تغییرات بار دینامیکی، مانند بازوهای رباتیک، مناسبترین هستند. از سوی دیگر، سیستمهای کنترل پلهای برای کاربردهایی که نیاز به شتاب کم تا متوسط و گشتاور نگهدارنده بالا دارند، مانند چاپگرهای سهبعدی، نوار نقالهها، محورهای فرعی و غیره، مناسبتر هستند. از آنجا که موتورهای پلهای ارزانتر هستند، میتوانند در صورت استفاده، هزینه سیستمهای اتوماسیون را کاهش دهند. سیستمهای کنترل حرکتی که نیاز به بهرهگیری از ویژگیهای موتورهای سروو دارند، باید ثابت کنند که این موتورهای پرهزینه ارزش وزن طلا را دارند.
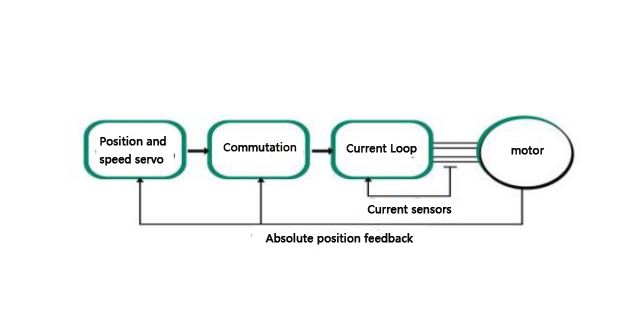
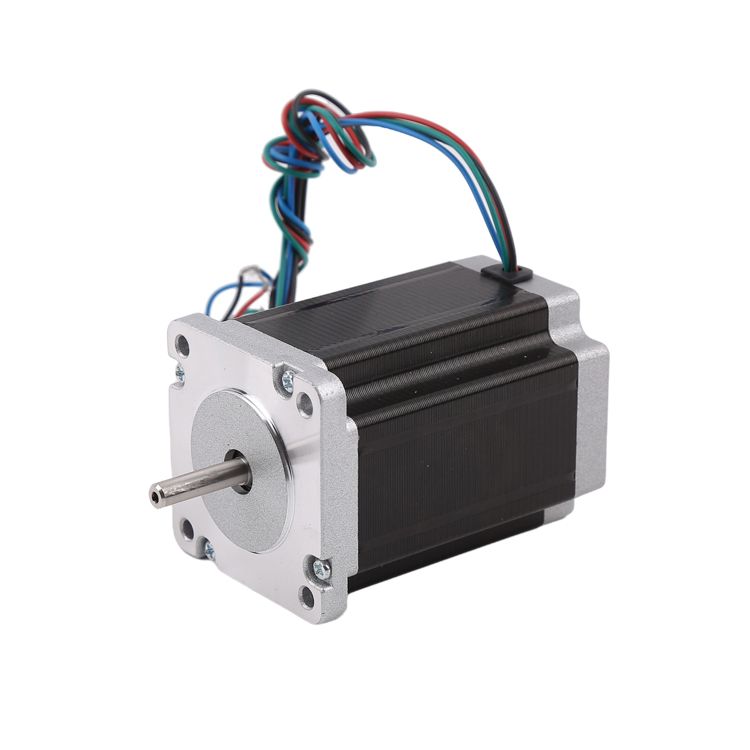
موتورهای پلهای با کنترل حلقه بسته
موتور پلهای با کنترل الکترونیکی یکپارچه معادل یک موتور DC بدون جاروبک دو فاز است و میتواند کنترل حلقه موقعیت، کنترل حلقه سرعت، کنترل DQ و سایر الگوریتمها را انجام دهد. یک انکودر مطلق تک دور برای کموتاسیون حلقه بسته استفاده میشود، بنابراین گشتاور بهینه را در هر سرعتی تضمین میکند.
مصرف انرژی پایین و خنک نگه داشتن
موتورهای پلهای VIC از نظر مصرف انرژی بسیار کارآمد هستند. برخلاف موتورهای پلهای حلقه باز که همیشه با فرمان جریان کامل کار میکنند و باعث مشکلات گرما و سر و صدا میشوند، جریان با توجه به شرایط واقعی حرکت، به عنوان مثال در هنگام شتابگیری و کاهش سرعت، تغییر میکند. مشابه سروو موتورها، جریان مصرف شده توسط این موتورهای پلهای در هر لحظه متناسب با گشتاور واقعی مورد نیاز است. از آنجا که موتور و برد کنترل الکترونیکی یکپارچه خنکتر کار میکنند، موتورهای پلهای VIC میتوانند به گشتاورهای اوج بالاتری در مقایسه با موتورهای سروو موتور دست یابند.
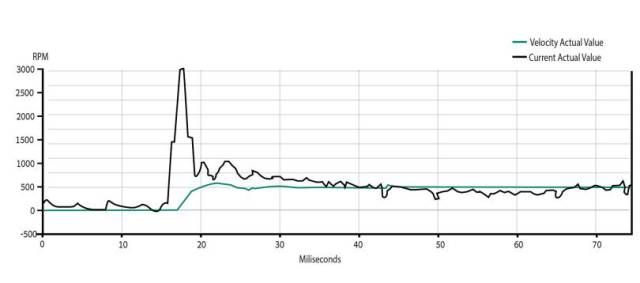
حتی در سرعتهای بالا، موتورهای پلهای VIC به جریان کمتری نیاز دارند.
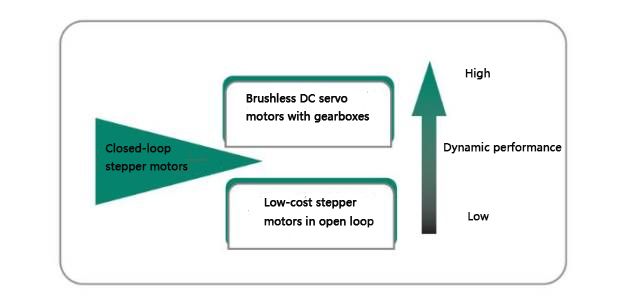
با پیشرفت در فناوری حلقه بسته، موتورهای پلهای قادر به نفوذ به کاربردهای با کارایی بالا و سرعت بالا هستند که قبلاً منحصراً به موتورهای سروو تعلق داشتند.
موتورهای پلهای با فناوری حلقه بسته
چه میشد اگر مزایای فناوری سروو موتور حلقه بسته را میشد در موتورهای پلهای به کار برد؟
آیا میتوانیم به عملکرد قابل مقایسه با سروو موتورها دست یابیم، در حالی که همچنان از مزایای هزینهای موتورهای پلهای بهرهمند باشیم؟
با ترکیب فناوری کنترل حلقه بسته، موتور پلهای به محصولی جامع با مزایای هر دو موتور سروو و پلهای با هزینه کم تبدیل خواهد شد. از آنجا که موتورهای پلهای حلقه بسته پیشرفتهای قابل توجهی در عملکرد و بهرهوری انرژی ارائه میدهند، میتوانند در تعداد فزایندهای از کاربردهای استاندارد بالا، جایگزین موتورهای سروو گرانتر شوند.
در ادامه مثالی از یک موتور پلهای یکپارچه VIC با کنترل حلقه بسته تعبیه شده آورده شده است تا عملکرد و مزایا و معایب موتورهای پلهای با فناوری حلقه بسته توضیح داده شود.
الزامات عملکردی دقیقاً منطبق
برای اطمینان از گشتاور کافی برای غلبه بر اختلالات و جلوگیری از از دست دادن گامها، موتورهای پلهای حلقه باز معمولاً باید اطمینان حاصل کنند که گشتاور حداقل 40٪ بیشتر از مقدار مورد نیاز کاربرد است. موتورهای پلهای حلقه بسته امروزی این مشکل را ندارند. هنگامی که این موتورهای پلهای به دلیل اضافه بار از کار میافتند، بدون از دست دادن گشتاور، بار را نگه میدارند. آنها پس از رفع شرایط اضافه بار، به کار خود ادامه میدهند. حداکثر گشتاور را میتوان در هر سرعت معینی تضمین کرد و سنسور موقعیت تضمین میکند که هیچ گونه از دست دادن گامی وجود ندارد. بنابراین، موتورهای پلهای حلقه بسته را میتوان طوری تعیین کرد که دقیقاً با الزامات گشتاور کاربرد مربوطه مطابقت داشته باشند، بدون نیاز به حاشیه اضافی 40٪.
با موتورهای پلهای حلقه باز، به دلیل خطر از دست دادن پلهها، برآورده کردن الزامات گشتاور لحظهای بالا دشوار است. در مقایسه با موتورهای پلهای معمولی، موتورهای پلهای حلقه بسته VIC میتوانند به شتاب بسیار سریع، نویز عملیاتی کم و رزونانس کم دست یابند. آنها میتوانند در پهنای باند بسیار بالاتری کار کنند و به عملکرد عالی دست یابند.
بدون کابینت
تودا برد کنترل درایو را با موتور ادغام میکند، میزان سیمکشی را کاهش میدهد و راهحل پیادهسازی را ساده میکند. با تودا، میتوانید ماشینهایی بدون کابینت بسازید.
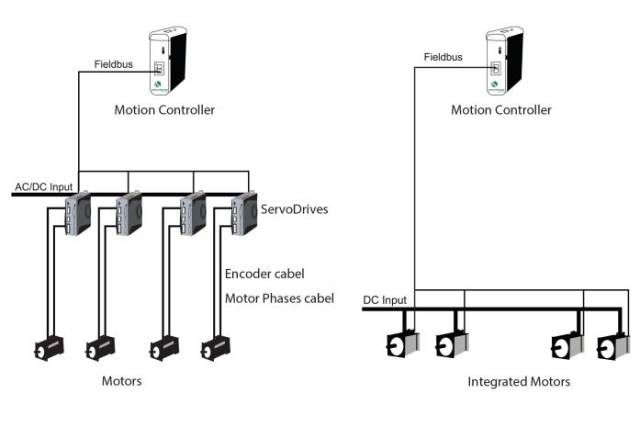
ادغام الکترونیک با موتورهای پلهای، پیچیدگی را کاهش میدهد
با فناوری حلقه بسته، موتورهای پلهای حلقه بسته دقت و راندمان عالی را در کنار عملکرد یک سروو موتور و هزینه پایین یک موتور پلهای به کاربران ارائه میدهند. موتورهای پلهای ارزانتر به تدریج در حال نفوذ به کاربردهایی هستند که در غیر این صورت تحت سلطه موتورهای سروو پرهزینه قرار میگرفتند.
زمان ارسال: آوریل-10-2023