.jpg)
.jpg)
.jpg)
.jpg)
موتور پلهای هیبریدی Nema 23 (57 میلیمتر)، دوقطبی، 4 سیم، پیچ لید ACME، سر و صدای کم، عمر طولانی، عملکرد بالا.
موتور پلهای هیبریدی Nema 23 (57 میلیمتر)، دوقطبی، 4 سیم، پیچ لید ACME، سر و صدای کم، عمر طولانی، عملکرد بالا.
این موتور پلهای هیبریدی ۵۷ میلیمتری در سه نوع موجود است: محرک خارجی، محور عبوری و محور ثابت عبوری. میتوانید بر اساس نیازهای خاص خود انتخاب کنید.
این موتور در اندازههای 20 میلیمتر، 28 میلیمتر، 35 میلیمتر، 42 میلیمتر، 57 میلیمتر، 86 میلیمتر موجود است.
طول گام، 0.001524 میلیمتر ~ 0.127 میلیمتر
عملکرد: حداکثر نیروی رانش تا ۲۴۰ کیلوگرم، افزایش دمای پایین، لرزش کم، صدای کم، عمر طولانی (تا ۵ میلیون سیکل)، دقت موقعیتیابی بالا (تا ±۰.۰۱ میلیمتر)
توضیحات
| نام محصول | موتورهای پلهای هیبریدی ۵۷ میلیمتری |
| مدل | VSM57HSM |
| نوع | موتورهای پلهای هیبریدی |
| زاویه گام | ۱.۸ درجه |
| ولتاژ (ولت) | ۲.۳ / ۳ / ۳.۱ / ۳.۸ |
| جریان (A) | ۳/۴ |
| مقاومت (اهم) | ۰.۷۵ / ۱ / ۰.۷۸ / ۰.۹۵ |
| اندوکتانس (میلیهانری) | ۲.۵ / ۴.۵ / ۳.۳ / ۴.۵ |
| سیمهای سربی | 4 |
| طول موتور (میلیمتر) | ۴۵ / ۵۵ / ۶۵ / ۷۵ |
| دمای محیط | -20℃ ~ +50℃ |
| افزایش دما | حداکثر ۸۰ هزار |
| مقاومت دی الکتریک | حداکثر ۱ میلیآمپر در ۵۰۰ ولت، ۱ کیلوهرتز، ۱ ثانیه |
| مقاومت عایق | حداقل ۱۰۰ مگا اهم @۵۰۰ ولت DC |
گواهینامهها

پارامترهای الکتریکی:
| اندازه موتور | ولتاژ /فاز (وی) | فعلی /فاز (الف) | مقاومت /فاز (Ω) | اندوکتانس /فاز (میلیهشت) | تعداد سیمهای سربی | اینرسی روتور (گرم بر سانتیمتر مربع)2) | وزن موتور (گ) | طول موتور L (میلیمتر) |
| 57 | ۲.۳ | 3 | ۰.۷۵ | ۲.۵ | 4 | ۱۵۰ | ۵۸۰ | 45 |
| 57 | 3 | 3 | 1 | ۴.۵ | 4 | ۳۰۰ | ۷۱۰ | 55 |
| 57 | ۳.۱ | 4 | ۰.۷۸ | ۳.۳ | 4 | ۴۰۰ | ۸۸۰ | 65 |
| 57 | ۳.۸ | 4 | ۰.۹۵ | ۴.۵ | 4 | ۴۸۰ | ۹۵۰ | 75 |
مشخصات پیچ سربی و پارامترهای عملکرد
| قطر (میلیمتر) | سرب (میلیمتر) | قدم (میلیمتر) | نیروی قفل خودکار را خاموش کنید (ن) |
| ۹.۵۲۵ | ۱.۲۷ | ۰.۰۰۶۳۵ | ۸۰۰ |
| ۹.۵۲۵ | ۲.۵۴ | ۰.۰۱۲۷ | ۳۰۰ |
| ۹.۵۲۵ | ۵.۰۸ | ۰.۰۲۵۴ | 90 |
| ۹.۵۲۵ | ۱۰.۱۶ | ۰.۰۵۰۸ | 30 |
| ۹.۵۲۵ | ۲۵.۴ | ۰.۱۲۷ | 6 |
توجه: برای مشخصات بیشتر پیچ لید اسکرو، لطفا با ما تماس بگیرید.
طرح کلی موتور خارجی استاندارد VSM57HSM:
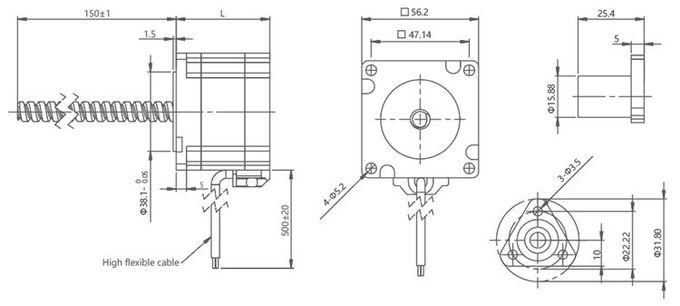
یادداشتها:
طول پیچ سربی قابل تنظیم است
ماشینکاری سفارشی در انتهای لید اسکرو قابل انجام است
طرح کلی موتور پلهای هیبریدی ۵۷ میلیمتری استاندارد:
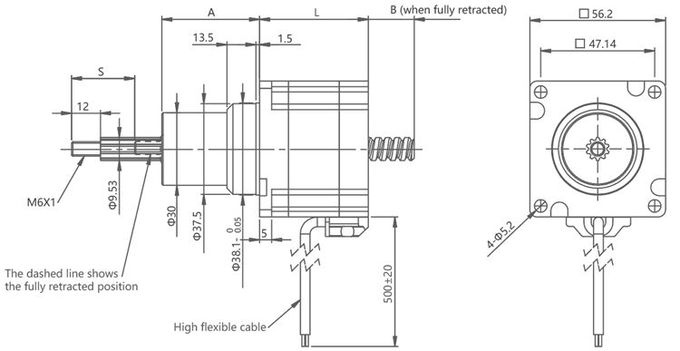
یادداشتها:
ماشینکاری سفارشی در انتهای لید اسکرو قابل انجام است
| سکته مغزی S (میلیمتر) | بُعد الف (میلیمتر) | ابعاد B (میلیمتر) | |||
| ل = ۴۵ | ل = ۵۵ | ل = ۶۵ | ل = ۷۵ | ||
| ۱۲.۷ | ۲۴.۱ | ۱.۱ | 0 | 0 | 0 |
| ۱۹.۱ | ۳۰.۵ | ۷.۵ | 0 | 0 | 0 |
| ۲۵.۴ | ۳۶.۸ | ۱۳.۸ | ۴.۸ | 0 | 0 |
| ۳۱.۸ | ۴۳.۲ | ۲۰.۲ | ۱۱.۲ | ۰.۲ | 0 |
| ۳۸.۱ | ۴۹.۵ | ۲۶.۵ | ۱۷.۵ | ۶.۵ | 0 |
| ۵۰.۸ | ۶۲.۲ | ۳۹.۲ | ۳۰.۲ | ۱۹.۲ | ۹.۱ |
| ۶۳.۵ | ۷۴.۹ | ۵۱.۹ | ۴۲.۹ | ۳۱.۹ | ۲۱.۹ |
طرح کلی موتور پلهای هیبریدی ۵۷ میلیمتری استاندارد با موتور ثابت
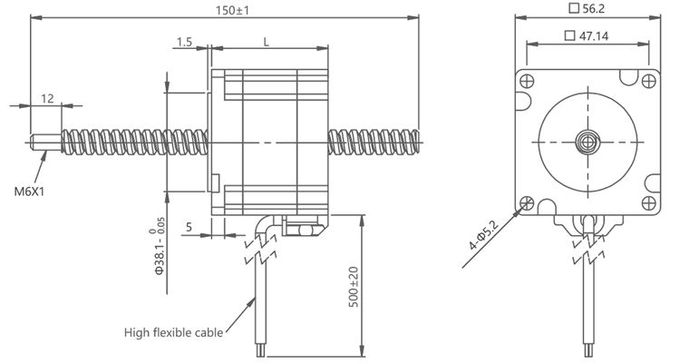
یادداشتها:
طول پیچ سربی قابل تنظیم است
ماشینکاری سفارشی در انتهای لید اسکرو قابل انجام است
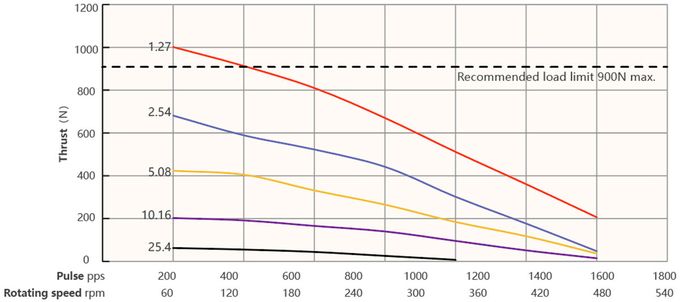
منحنی سرعت و رانش:
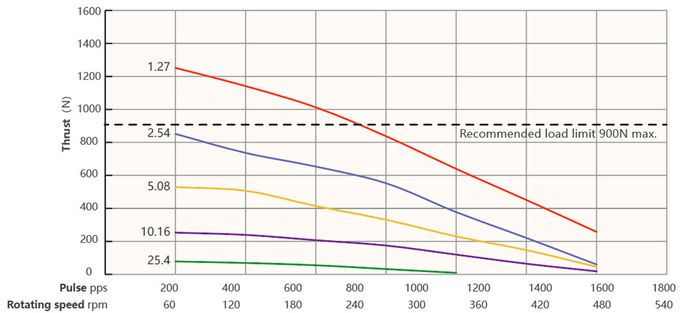
درایو چاپر دوقطبی سری ۵۷ با طول موتور ۴۵ میلیمتر
فرکانس پالس جریان ۱۰۰٪ و منحنی رانش (پیچ لید اسکرو Φ۹.۵۲۵ میلیمتر)
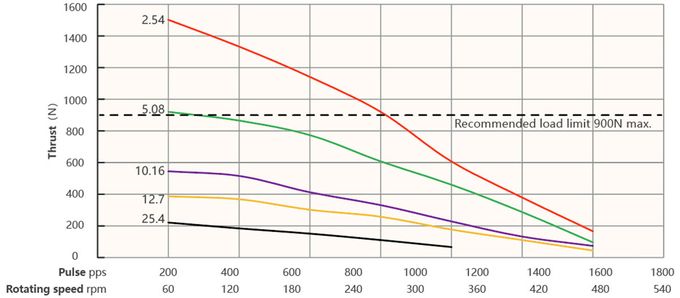
درایو چاپر دوقطبی سری ۵۷ با طول موتور ۵۵ میلیمتر
فرکانس پالس جریان ۱۰۰٪ و منحنی رانش (پیچ لید اسکرو Φ۹.۵۲۵ میلیمتر)
| سرب (میلیمتر) | سرعت خطی (میلیمتر بر ثانیه) | ||||||||
| ۱.۲۷ | ۱.۲۷ | ۲.۵۴ | ۳.۸۱ | ۵.۰۸ | ۶.۳۵ | ۷.۶۲ | ۸.۸۹ | ۱۰.۱۶ | ۱۱.۴۳ |
| ۲.۵۴ | ۲.۵۴ | ۵.۰۸ | ۷.۶۲ | ۱۰.۱۶ | ۱۲.۷ | ۱۵.۲۴ | ۱۷.۷۸ | ۲۰.۳۲ | ۲۲.۸۶ |
| ۵.۰۸ | ۵.۰۸ | ۱۰.۱۶ | ۱۵.۲۴ | ۲۰.۳۲ | ۲۵.۴ | ۳۰.۴۸ | ۳۵.۵۶ | ۴۰.۶۴ | ۴۵.۷۲ |
| ۱۰.۱۶ | ۱۰.۱۶ | ۲۰.۳۲ | ۳۰.۴۸ | ۴۰.۶۴ | ۵۰.۸ | ۶۰.۹۶ | ۷۱.۱۲ | ۸۱.۲۸ | ۹۱.۴۴ |
| ۲۵.۴ | ۲۵.۴ | ۵۰.۸ | ۷۶.۲ | ۱۰۱.۶ | ۱۲۷ | ۱۵۲.۴ | ۷۱۱.۸ | ۲۰۳.۲ | ۲۲۸.۶ |
شرایط آزمایش:
درایو چاپر، بدون رمپ، نیمه میکرو پلهای، ولتاژ درایو ۴۰ ولت
درایو چاپر دوقطبی سری ۵۷ با طول موتور ۶۵ میلیمتر
فرکانس پالس جریان ۱۰۰٪ و منحنی رانش (پیچ لید اسکرو Φ۹.۵۲۵ میلیمتر)
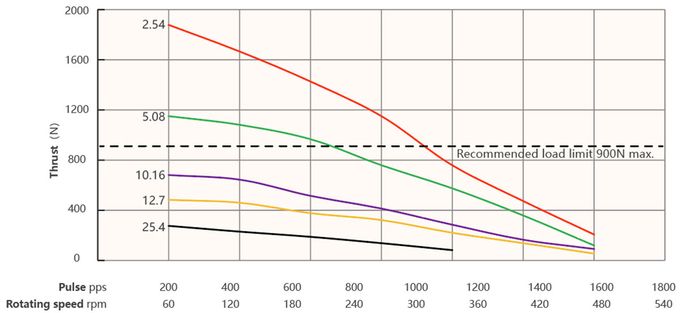
درایو چاپر دوقطبی سری ۵۷ با طول موتور ۷۵ میلیمتر
فرکانس پالس جریان ۱۰۰٪ و منحنی رانش (پیچ لید اسکرو Φ۹.۵۲۵ میلیمتر)
| سرب (میلیمتر) | سرعت خطی (میلیمتر بر ثانیه) | ||||||||
| ۱.۲۷ | ۱.۲۷ | ۲.۵۴ | ۳.۸۱ | ۵.۰۸ | ۶.۳۵ | ۷.۶۲ | ۸.۸۹ | ۱۰.۱۶ | ۱۱.۴۳ |
| ۲.۵۴ | ۲.۵۴ | ۵.۰۸ | ۷.۶۲ | ۱۰.۱۶ | ۱۲.۷ | ۱۵.۲۴ | ۱۷.۷۸ | ۲۰.۳۲ | ۲۲.۸۶ |
| ۵.۰۸ | ۵.۰۸ | ۱۰.۱۶ | ۱۵.۲۴ | ۲۰.۳۲ | ۲۵.۴ | ۳۰.۴۸ | ۳۵.۵۶ | ۴۰.۶۴ | ۴۵.۷۲ |
| ۱۰.۱۶ | ۱۰.۱۶ | ۲۰.۳۲ | ۳۰.۴۸ | ۴۰.۶۴ | ۵۰.۸ | ۶۰.۹۶ | ۷۱.۱۲ | ۸۱.۲۸ | ۹۱.۴۴ |
| ۲۵.۴ | ۲۵.۴ | ۵۰.۸ | ۷۶.۲ | ۱۰۱.۶ | ۱۲۷ | ۱۵۲.۴ | ۷۱۱.۸ | ۲۰۳.۲ | ۲۲۸.۶ |
شرایط آزمایش:
درایو چاپر، بدون رمپ، نیمه میکرو پلهای، ولتاژ درایو ۴۰ ولت
زمینههای کاربرد
چاپ سه بعدی:موتورهای پلهای هیبریدی ۵۷ میلیمتری به طور گسترده در چاپگرهای سهبعدی برای کنترل موقعیت و حرکت هد چاپ استفاده میشوند.
ماشین آلات CNC:در ماشینهای ابزار کنترل عددی کامپیوتری (CNC)، از موتورهای پلهای هیبریدی ۵۷ میلیمتری برای کنترل حرکت ابزارهای برش جهت عملیات ماشینکاری دقیق استفاده میشود.
تجهیزات اتوماسیون:موتورهای پلهای هیبریدی ۵۷ میلیمتری میتوانند در انواع تجهیزات اتوماسیون مانند ماشینهای بستهبندی اتوماتیک، سیستمهای مرتبسازی اتوماتیک، خطوط مونتاژ اتوماتیک و غیره برای کنترل حرکت و موقعیتیابی استفاده شوند.
ماشین آلات نساجی:در صنعت نساجی، موتورهای پلهای هیبریدی ۵۷ میلیمتری میتوانند برای کنترل ماشینهای ریسندگی، دستگاههای بافندگی و سایر تجهیزات مورد استفاده قرار گیرند تا دقت و پایداری فرآیند نساجی تضمین شود.
تجهیزات پزشکی:موتورهای پلهای هیبریدی ۵۷ میلیمتری به طور گسترده در تجهیزات پزشکی مانند پمپهای سرنگ پزشکی، رباتهای پزشکی، تجهیزات اسکن تصویر و غیره برای کنترل دقیق موقعیت و کنترل حرکت استفاده میشوند.
رباتیک:موتورهای پلهای هیبریدی ۵۷ میلیمتری در انواع کاربردهای رباتیک، از جمله رباتهای صنعتی، رباتهای خدماتی، رباتهای مشارکتی و غیره، برای حرکت و دستکاری دقیق استفاده میشوند.
سیستمهای انبارداری خودکار:در سیستمهای انبارداری و لجستیک خودکار، موتورهای پلهای هیبریدی ۵۷ میلیمتری میتوانند برای کنترل تسمههای نقاله، بالابرها، جرثقیلهای انبار و سایر تجهیزات برای دستیابی به موقعیتیابی دقیق و جابجایی اقلام استفاده شوند.
اینها تنها برخی از کاربردهای معمول موتورهای پلهای هیبریدی ۵۷ میلیمتری هستند و در واقع، آنها به طور گسترده در بسیاری از زمینههای دیگر، از جمله تجهیزات چاپ، سیستمهای امنیتی، ابزار دقیق و غیره استفاده میشوند.
مزیت
نسبت گشتاور به اندازه بالا:موتورهای پلهای هیبریدی ۵۷ میلیمتری، با وجود اندازه جمعوجورشان، میتوانند گشتاور خروجی بالایی ارائه دهند. این ویژگی، آنها را برای کاربردهایی که فضا محدود است اما گشتاور بالا مورد نیاز است، مناسب میکند.
کنترل حلقه باز:موتورهای پلهای هیبریدی میتوانند در یک سیستم کنترل حلقه باز کار کنند، به این معنی که به دستگاههای بازخورد موقعیت مانند انکودر نیاز ندارند. این امر سیستم کنترل را ساده کرده و هزینههای کلی را کاهش میدهد.
موقعیت یابی دقیق:موتورهای پلهای هیبریدی به دلیل وضوح ذاتی پله، قابلیت موقعیتیابی دقیقی را ارائه میدهند. آنها میتوانند با گامهای کوچک حرکت کنند و موقعیتیابی دقیق و تکرارپذیری را ممکن سازند.
عملکرد روان:موتورهای پلهای هیبریدی میتوانند به عملکرد روان دست یابند، به خصوص هنگامی که با تکنیکهای میکرواستپینگ هدایت میشوند. میکرواستپینگ هر پله را به زیرپلههای کوچکتر تقسیم میکند و در نتیجه حرکت روانتر و لرزش کاهش مییابد.
زمان پاسخ سریع:موتورهای پلهای هیبریدی زمان پاسخ سریعی دارند که امکان شتابگیری و کاهش سرعت سریع را فراهم میکند. این ویژگی برای کاربردهایی که نیاز به حرکات پویا و چابک دارند، مفید است.
قابلیت اطمینان و دوام بالا:موتورهای پلهای هیبریدی به دلیل استحکام و قابلیت اطمینانشان شناخته شدهاند. آنها عمر عملیاتی طولانی، نیاز به نگهداری کم و تحمل شرایط عملیاتی سخت دارند.
راه حل مقرون به صرفه:در مقایسه با سایر فناوریهای کنترل حرکت مانند سروو موتورها، موتورهای پلهای هیبریدی عموماً راهحل مقرونبهصرفهتری ارائه میدهند. آنها تعادل خوبی بین عملکرد و قیمت مناسب برقرار میکنند.
ادغام آسان:موتورهای پلهای هیبریدی به طور گسترده در دسترس هستند و با انواع سیستمهای الکترونیکی و کنترلی درایو سازگارند. آنها را میتوان به راحتی در انواع مختلف ماشینآلات و تنظیمات اتوماسیون ادغام کرد.
بهرهوری انرژی:موتورهای پلهای هیبریدی فقط زمانی که در حال حرکت هستند برق مصرف میکنند و این باعث میشود که از نظر انرژی کارآمد باشند. وقتی ثابت هستند، به برق مداوم نیاز ندارند و در کل به صرفهجویی در انرژی کمک میکنند.
الزامات انتخاب موتور:
► جهت حرکت/نصب
► الزامات بار
►الزامات سکته مغزی
► الزامات ماشینکاری نهایی
► الزامات دقیق
►الزامات بازخورد رمزگذار
► الزامات تنظیم دستی
► الزامات زیستمحیطی
کارگاه تولید


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)