





موتور پلهای هیبریدی Nema 23 (57 میلیمتر) با زاویه گام 1.8 درجه، 4 سیم رابط برای تجهیزات تشخیصی پزشکی
موتور پلهای هیبریدی Nema 23 (57 میلیمتر) با زاویه گام 1.8 درجه، 4 سیم رابط برای تجهیزات تشخیصی پزشکی
موتور پلهای هیبریدی Nema 23 (57 میلیمتری)، دوقطبی، 4 سیم، بال اسکرو، کم صدا، عمر طولانی، عملکرد بالا، دارای گواهینامه CE و RoHS.
ظرفیت بار زیاد، لرزش کم، سر و صدای کم، سرعت بالا، پاسخ سریع، عملکرد روان، عمر طولانی، دقت موقعیت یابی بالا (تا ±0.005 میلی متر)
توضیحات
| نام محصول | موتور پلهای هیبریدی بال اسکرو ۵۷ میلیمتری |
| مدل | VSM57BSHSM |
| نوع | موتورهای پلهای هیبریدی |
| زاویه گام | ۱.۸ درجه |
| ولتاژ (ولت) | ۲.۳ / ۳ / ۳.۱ / ۳.۸ |
| جریان (A) | ۳ / ۴ |
| مقاومت (اهم) | ۰.۷۵ / ۱ / ۰.۷۸ / ۰.۹۵ |
| اندوکتانس (میلیهانری) | ۲.۵ / ۴.۵ / ۳.۳ / ۴.۵ |
| سیمهای سربی | 4 |
| طول موتور (میلیمتر) | ۴۵ / ۵۵ / ۶۵ / ۷۵ |
| دمای محیط | -20℃ ~ +50℃ |
| افزایش دما | حداکثر ۸۰ هزار |
| مقاومت دی الکتریک | حداکثر ۱ میلیآمپر در ۵۰۰ ولت، ۱ کیلوهرتز، ۱ ثانیه |
| مقاومت عایق | حداقل ۱۰۰ مگا اهم @۵۰۰ ولت DC |
گواهینامهها

پارامترهای الکتریکی:
| اندازه موتور | ولتاژ /فاز (وی) | فعلی /فاز (الف) | مقاومت /فاز (Ω) | اندوکتانس /فاز (میلیهشت) | تعداد سیمهای سربی | اینرسی روتور (گرم بر سانتیمتر مربع)2) | وزن موتور (گ) | طول موتور L (میلیمتر) |
| 57 | ۲.۳ | 3 | ۰.۷۵ | ۲.۵ | 4 | ۱۵۰ | ۵۸۰ | 45 |
| 57 | 3 | 3 | 1 | ۴.۵ | 4 | ۳۰۰ | ۷۱۰ | 55 |
| 57 | ۳.۱ | 4 | ۰.۷۸ | ۳.۳ | 4 | ۴۰۰ | ۸۸۰ | 65 |
| 57 | ۳.۸ | 4 | ۰.۹۵ | ۴.۵ | 4 | ۴۸۰ | ۹۵۰ | 75 |
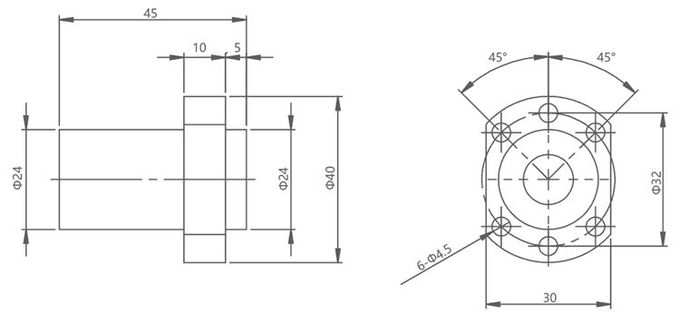
طرح کلی موتور خارجی استاندارد VSM57BSHSM:
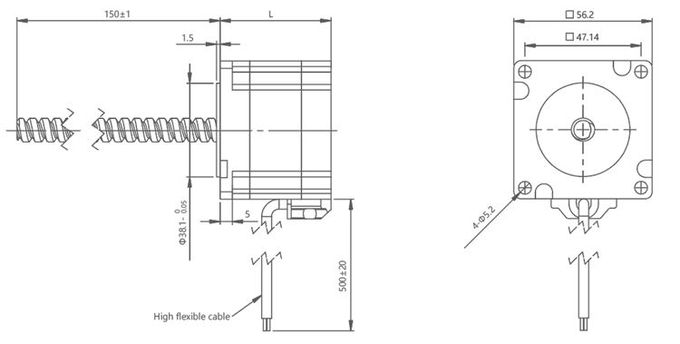
یادداشتها:
طول پیچ سربی قابل تنظیم است
ماشینکاری سفارشی در انتهای لید اسکرو قابل انجام است
لطفا برای مشخصات بیشتر پیچ ساچمه ای با ما تماس بگیرید.
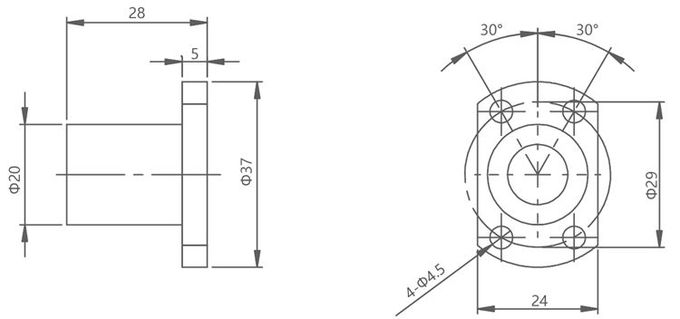
طرح کلی مهره ساچمه ای VSM57BSHSMB 1202:
طرح کلی مهره ساچمه ای VSM57BSHSMB 1205:
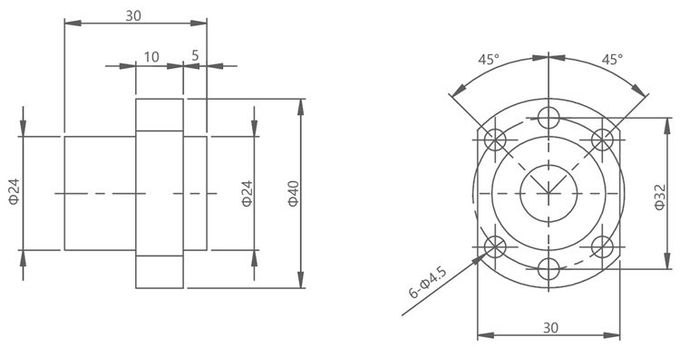
طرح کلی مهره ساچمه ای VSM57BSHSMB 1210:
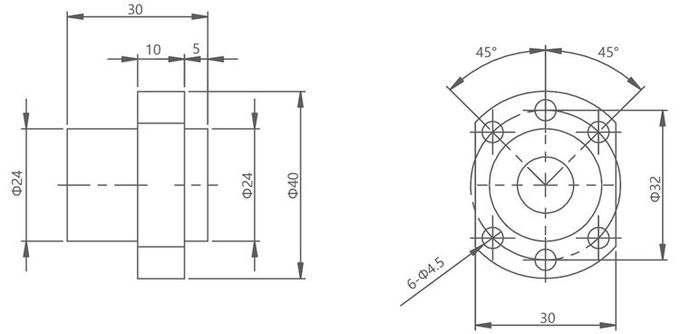
طرح کلی مهره ساچمه ای VSM57BSHSMB 1210:
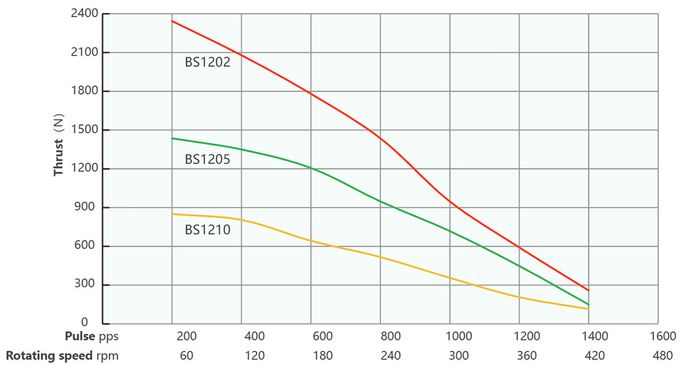
منحنی سرعت و رانش
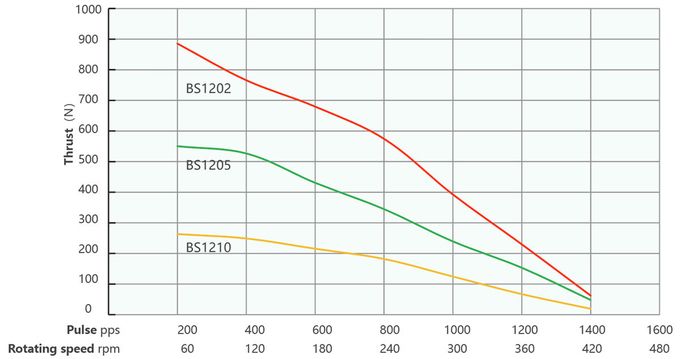
درایو چاپر دوقطبی سری ۵۷ با طول موتور ۴۵ میلیمتر
فرکانس پالس جریان ۱۰۰٪ و منحنی رانش
درایو چاپر دوقطبی سری ۵۷ با طول موتور ۵۵ میلیمتر
فرکانس پالس جریان ۱۰۰٪ و منحنی رانش
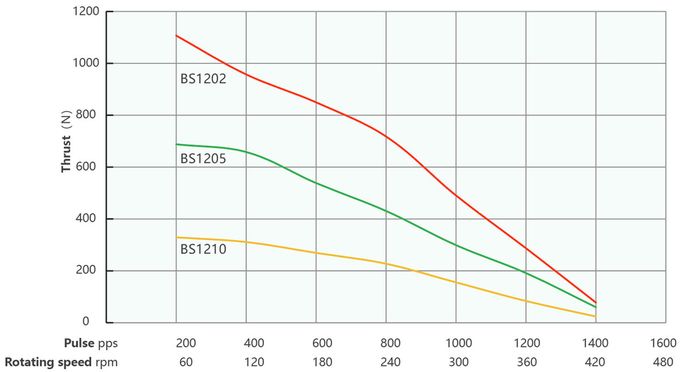
| سرب (میلیمتر) | سرعت خطی (میلیمتر بر ثانیه) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
شرایط آزمایش:درایو چاپر، بدون رمپ، نیمه میکرو پلهای، ولتاژ درایو ۴۰ ولت
درایو چاپر دوقطبی سری ۵۷ با طول موتور ۶۵ میلیمتر
فرکانس پالس جریان ۱۰۰٪ و منحنی رانش
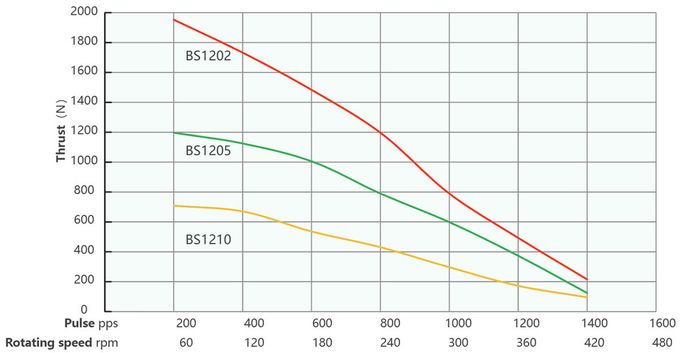
درایو چاپر دوقطبی سری ۵۷ با طول موتور ۷۵ میلیمتر
فرکانس پالس جریان ۱۰۰٪ و منحنی رانش
| سرب (میلیمتر) | سرعت خطی (میلیمتر بر ثانیه) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
شرایط آزمایش:درایو چاپر، بدون رمپ، نیمه میکرو پلهای، ولتاژ درایو ۴۰ ولت
زمینههای کاربرد:
تجهیزات تشخیص پزشکی:موتورهای پلهای هیبریدی ۵۷ میلیمتری با پیچهای ساچمهای میتوانند در تجهیزات تشخیصی پزشکی مانند اسکنرهای تصویر، اسکنرهای سیتی، تجهیزات اشعه ایکس، دستگاههای MRI و غیره مورد استفاده قرار گیرند. کنترل موقعیت و پایداری با دقت بالای آنها، حرکت و موقعیتیابی دقیق را در حین اخذ و پردازش تصاویر پزشکی امکانپذیر میکند.
ابزارهای علوم زیستی:در تحقیقات و آزمایشهای علوم زیستی، موتورهای پلهای هیبریدی ۵۷ میلیمتری بال اسکرو در سیستمهای خودکار جابجایی مایعات، تجهیزات غربالگری با توان عملیاتی بالا، دستگاههای کشت سلولی، توالییابهای ژنی و موارد دیگر استفاده میشوند. دقت و قابلیت اطمینان بالای این موتورها، آنها را قادر میسازد تا نیاز به کنترل دقیق حرکت و موقعیت در تجهیزات آزمایشگاهی را برآورده کنند.
رباتیک:موتورهای پلهای هیبریدی بال اسکرو ۵۷ میلیمتری به طور گسترده در رباتیک برای درایوهای مفاصل، حرکت بازوی رباتیک و موقعیتیابی دقیق استفاده میشوند. این موتورها با گشتاور بالا، وضوح بالا و نویز کم مشخص میشوند تا نیاز به حرکت و کنترل دقیق در کاربردهای رباتیک را برآورده کنند.
تجهیزات لیزر:موتورهای پلهای هیبریدی ۵۷ میلیمتری با پیچ ساچمهای میتوانند در تجهیزات لیزری برای کارهایی مانند تنظیم فوکوس، میز پنینگ و کنترل مسیر نوری استفاده شوند. کنترل موقعیت با دقت بالا و پایداری آن، امکان فوکوس و موقعیتیابی دقیق پرتو لیزر را فراهم میکند.
ابزارهای تحلیلی:در انواع مختلف ابزارهای تحلیلی آزمایشگاهی، موتورهای پلهای هیبریدی ۵۷ میلیمتری میتوانند در پردازش خودکار نمونه، سیستمهای تغذیه نمونه، کروماتوگرافهای مایع، کروماتوگرافهای گازی و غیره مورد استفاده قرار گیرند. حرکت با دقت بالا و عملکرد پایدار این موتورها نقش مهمی در بهبود دقت و کارایی تجزیه و تحلیل آزمایشگاهی دارند.
تجهیزات تولید نیمه هادی و الکترونیکی:موتورهای پلهای هیبریدی ۵۷ میلیمتری بال اسکرو برای موقعیتیابی دقیق و کنترل اتوماسیون در تجهیزات تولید نیمههادی و الکترونیکی استفاده میشوند. به عنوان مثال، میتوان از آنها در تجهیزات تست تراشه نیمههادی، ماشینهای بستهبندی، فناوری نصب سطحی، تولید برد مدار چاپی و سایر زمینهها برای ارائه کنترل حرکت با سرعت بالا، دقت بالا و قابل اعتماد استفاده کرد.
تجهیزات اتوماسیون غیر استاندارد و انواع مختلف تجهیزات اتوماسیون:موتورهای پلهای هیبریدی بال اسکرو ۵۷ میلیمتری برای طیف گستردهای از تجهیزات اتوماسیون غیر استاندارد و خطوط تولید خودکار مناسب هستند. آنها میتوانند در تجهیزات موقعیتیابی، سیستمهای مونتاژ خودکار، تجهیزات بستهبندی، ماشینآلات چاپ، تجهیزات نساجی و غیره مورد استفاده قرار گیرند. آنها کنترل موقعیت دقیق و عملکرد حرکتی قابل اعتمادی را برای رفع نیازهای اتوماسیون در زمینههای مختلف ارائه میدهند.
مزیت
نسبت گشتاور به اینرسی بالا:موتورهای پلهای هیبریدی بال اسکرو نسبت گشتاور به اینرسی بالایی دارند، به این معنی که میتوانند نسبت به اندازه و وزن خود، گشتاور خروجی قابل توجهی ارائه دهند. این امر آنها را برای کاربردهایی که به گشتاور بالا در یک فرم فاکتور جمع و جور نیاز دارند، مانند رباتیک، ماشینهای CNC و سیستمهای اتوماسیون، ایدهآل میکند.
شتاب و کاهش سرعت بالا:این موتورها قادر به شتابگیری و کاهش سرعت سریع هستند و امکان حرکات سریع و دقیق را فراهم میکنند. اینرسی کم روتور و خروجی گشتاور بالا، موتور را قادر میسازد تا به سرعت به سیگنالهای کنترل پاسخ دهد و در نتیجه زمانهای شروع و توقف سریعتر و عملکرد کلی سیستم بهبود یابد.
میکرواستپینگ روان:موتورهای پلهای هیبریدی بال اسکرو برای عملیات میکرواستپینگ بسیار مناسب هستند، که امکان وضوح دقیقتر و کنترل حرکت نرمتر را فراهم میکند. میکرواستپینگ هر پله کامل را به زیرپلههای کوچکتر تقسیم میکند، اندازه پله را کاهش میدهد و لرزش، نویز و اثرات رزونانس را به حداقل میرساند. این ویژگی به ویژه در کاربردهایی که نیاز به حرکت نرم و دقیق دارند، مانند چاپگرهای سهبعدی و سیستمهای موقعیتیابی خطی، مفید است.
لقی کم:مکانیزم پیچ توپی در این موتورها به حداقل رساندن لقی، که همان لقی یا فاصله بین روتور و بار است، کمک میکند. لقی کم، موقعیتیابی دقیق و تکرارپذیری را تضمین میکند، زیرا هنگام تغییر جهت یا حرکت معکوس، حداقل حرکت از دست رفته وجود دارد. این امر برای کاربردهایی که نیاز به موقعیتیابی دقیق و تکرارپذیر دارند، مانند ماشینهای برداشتن و گذاشتن و سیستمهای نوری، بسیار مهم است.
پاسخ دینامیکی بالا:ترکیب موتور پلهای هیبریدی و مکانیزم پیچ ساچمهای امکان پاسخ دینامیکی بالا را فراهم میکند، به این معنی که موتور میتواند به سرعت و با دقت تغییرات سیگنال کنترل را دنبال کند. این پاسخدهی برای کاربردهایی که شامل تغییرات سریع در سرعت، جهت یا موقعیت هستند، مانند ماشینکاری با سرعت بالا و سیستمهای کنترل حرکت دینامیکی، ضروری است.
راندمان حرارتی:موتورهای پلهای هیبریدی بال اسکرو به گونهای طراحی شدهاند که راندمان حرارتی خوبی داشته باشند و امکان اتلاف حرارت مؤثر را در حین کار فراهم کنند. این امر به جلوگیری از گرمای بیش از حد کمک میکند و عملکرد پایدار موتور را حتی در طول استفاده طولانی مدت یا در کاربردهای دشوار تضمین میکند.
راه حل مقرون به صرفه:موتورهای پلهای هیبریدی بال اسکرو، یک راه حل مقرون به صرفه برای کاربردهایی که نیاز به دقت و گشتاور بالا دارند، ارائه میدهند. در مقایسه با سیستمهای سروو موتور پیچیدهتر و گرانتر، موتورهای پلهای هیبریدی تعادلی بین عملکرد، هزینه و سهولت استفاده ایجاد میکنند. آنها اغلب برای کاربردهایی که هزینه عامل مهمی است، بدون به خطر انداختن کیفیت و عملکرد، انتخاب ارجح هستند.
الزامات انتخاب موتور:
► جهت حرکت/نصب
► الزامات بار
►الزامات سکته مغزی
► الزامات ماشینکاری نهایی
► الزامات دقیق
►الزامات بازخورد رمزگذار
► الزامات تنظیم دستی
► الزامات زیستمحیطی
کارگاه تولید


پیام خود را برای ما ارسال کنید:
دسته بندی محصولات
-

موتور پلهای هیبریدی Nema 14 (35 میلیمتری) با پیچ ساچمهای ...
-

موتور پلهای هیبریدی Nema 11 (28 میلیمتری) با پیچ ساچمهای ...
-

موتور پلهای هیبریدی Nema 34 (86 میلیمتری) با پیچ ساچمهای ...
-

موتور پلهای هیبریدی نیما ۸ (۲۰ میلیمتری) بال اسکرو ۱...
-

موتور پلهای هیبریدی نیما ۱۷ (۴۲ میلیمتری) با پیچ ساچمهای ...