





موتور پلهای هیبریدی Nema 14 (35 میلیمتری) با پیچ ساچمهای، زاویه گام 1.8 درجه، ولتاژ 1.4 / 2.9 ولت، جریان 1.5 آمپر، 4 سیم رابط
موتور پلهای هیبریدی Nema 14 (35 میلیمتری) با پیچ ساچمهای، زاویه گام 1.8 درجه، ولتاژ 1.4 / 2.9 ولت، جریان 1.5 آمپر، 4 سیم رابط
موتور پلهای هیبریدی Nema 14 (35 میلیمتری)، دوقطبی، 4 سیم، بال اسکرو، کم صدا، عمر طولانی، عملکرد بالا، دارای گواهینامه CE و RoHS.
توضیحات
| نام محصول | موتور پلهای هیبریدی بال اسکرو ۳۵ میلیمتری |
| مدل | VSM35BSHSM |
| نوع | موتورهای پلهای هیبریدی |
| زاویه گام | ۱.۸ درجه |
| ولتاژ (ولت) | ۱.۴ / ۲.۹ |
| جریان (A) | ۱.۵ |
| مقاومت (اهم) | ۰.۹۵ / ۱.۹ |
| اندوکتانس (میلیهانری) | ۱.۵ / ۲.۳ |
| سیمهای سربی | 4 |
| طول موتور (میلیمتر) | ۳۴ / ۴۵ |
| دمای محیط | -20℃ ~ +50℃ |
| افزایش دما | حداکثر ۸۰ هزار |
| مقاومت دی الکتریک | حداکثر ۱ میلیآمپر در ۵۰۰ ولت، ۱ کیلوهرتز، ۱ ثانیه |
| مقاومت عایق | حداقل ۱۰۰ مگا اهم @۵۰۰ ولت DC |
گواهینامهها

پارامترهای الکتریکی:
| اندازه موتور | ولتاژ/ فاز (وی) | فعلی/ فاز (الف) | مقاومت/ فاز (Ω) | اندوکتانس/ فاز (میلیهشت) | تعداد سیمهای سربی | اینرسی روتور (گرم بر سانتیمتر مربع)2) | وزن موتور (گ) | طول موتور L (میلیمتر) |
| 35 | ۱.۴ | ۱.۵ | ۰.۹۵ | ۱.۴ | 4 | 20 | ۱۹۰ | 34 |
| 35 | ۲.۹ | ۱.۵ | ۱.۹ | ۳.۲ | 4 | 30 | ۲۳۰ | 47 |
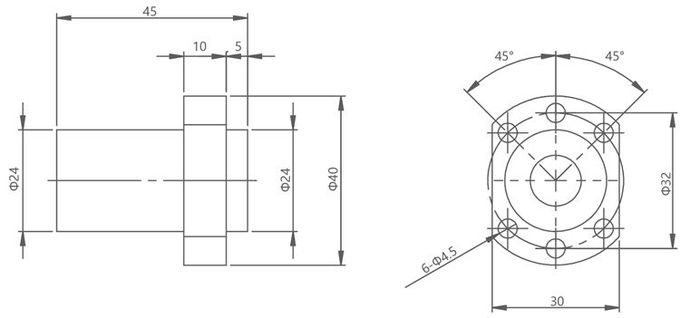
طراحی کلی موتور خارجی استاندارد VSM35BSHSM
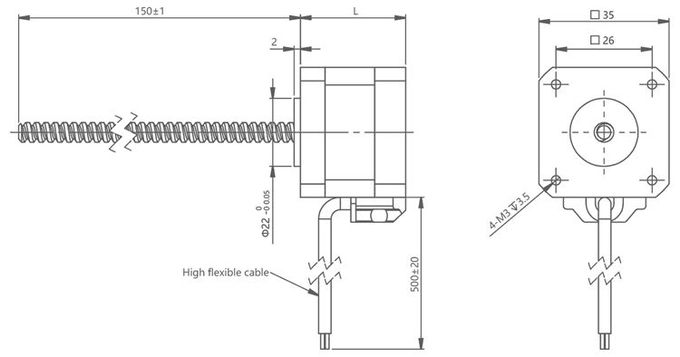
یادداشتها:
طول پیچ سربی قابل تنظیم است
ماشینکاری سفارشی در انتهای لید اسکرو قابل انجام است
لطفا برای مشخصات بیشتر پیچ ساچمه ای با ما تماس بگیرید.
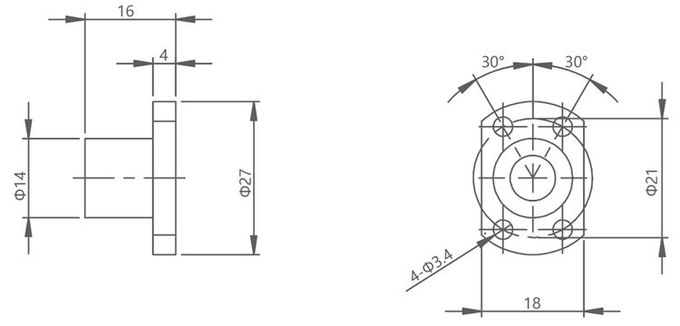
طرح کلی مهره ساچمه ای VSM35BSHSMB 0801 یا 0802
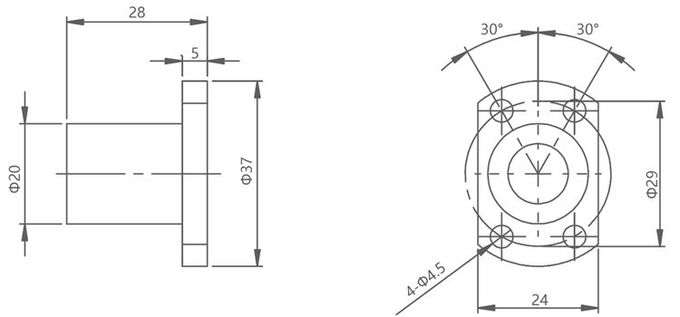
طرح کلی مهره ساچمه ای VSM35BSHSMB 1202
طرح کلی مهره ساچمه ای VSM35BSHSMB 1205:
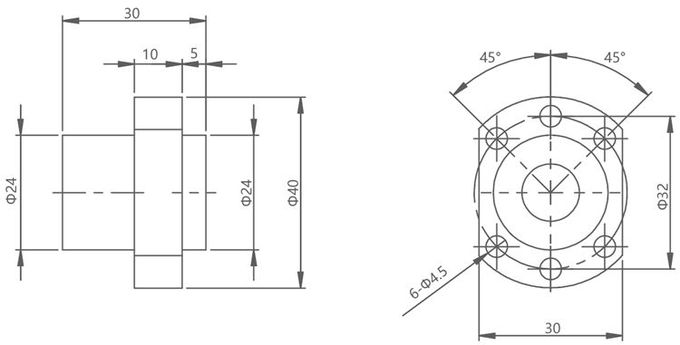
طرح کلی مهره ساچمه ای VSM35BSHSMB 1210
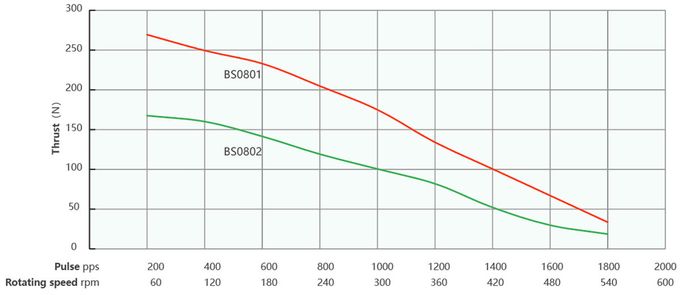
منحنی سرعت و رانش
درایو چاپر دو قطبی سری ۳۵ با طول موتور ۳۴ میلیمتر
فرکانس پالس جریان ۱۰۰٪ و منحنی رانش
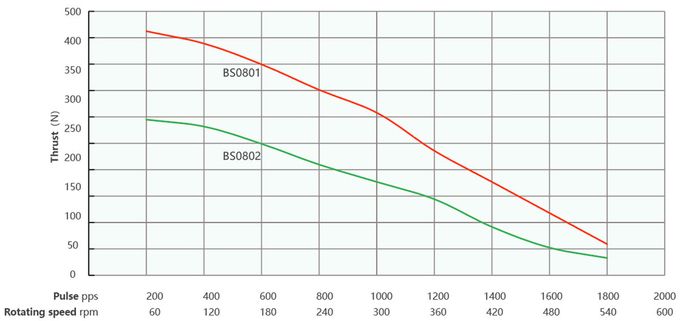
درایو چاپر دو قطبی سری ۳۵ با طول موتور ۴۷ میلیمتر
فرکانس پالس جریان ۱۰۰٪ و منحنی رانش
| سرب (میلیمتر) | سرعت خطی (میلیمتر بر ثانیه) | |||||||||
| 1 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 18 | 20 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | ۱۰۰ |
شرایط آزمایش:درایو چاپر، بدون رمپ، نیمه میکرو پلهای، ولتاژ درایو ۲۴ ولت
زمینههای کاربرد:
اتوماسیون صنعتی:موتورهای پلهای هیبریدی بال اسکرو ۳۵ میلیمتری کاربرد گستردهای در کاربردهای اتوماسیون صنعتی دارند. آنها را میتوان در خطوط مونتاژ خودکار، سیستمهای نقاله، بازوهای رباتیک و سایر ماشینآلاتی که نیاز به موقعیتیابی دقیق و کنترل حرکت قابل اعتماد دارند، به کار برد.
ماشین آلات سی ان سی:دستگاههای کنترل عددی کامپیوتری (CNC) از موتورهای پلهای هیبریدی بال اسکرو 35 میلیمتری به دلیل دقت و صحت بالای آنها استفاده میکنند. این موتورها نقش مهمی در کنترل حرکت ابزارهای برش، تضمین برشهای دقیق و نتایج پایدار در عملیات مختلف ماشینکاری دارند.
چاپ سه بعدی:موتورهای پلهای هیبریدی ۳۵ میلیمتری بال اسکرو برای چاپگرهای سهبعدی مناسب هستند، جایی که کنترل لازم برای حرکت هد چاپ یا پلتفرم ساخت را فراهم میکنند. گشتاور و دقت بالای آنها به لایهبندی دقیق و جزئیات پیچیده در اشیاء چاپ سهبعدی کمک میکند.
تجهیزات پزشکی:در حوزه پزشکی، موتورهای پلهای هیبریدی بال اسکرو ۳۵ میلیمتری در دستگاههای مختلف پزشکی، از جمله ابزارهای تشخیصی، رباتهای جراحی، توزیعکنندههای خودکار دارو و دستگاههای پروتز، کاربرد دارند. این موتورها دقت و قابلیت اطمینان لازم را برای رویهها و تجهیزات پزشکی حیاتی ارائه میدهند.
تجهیزات آزمایشگاهی:ابزارهای آزمایشگاهی و دستگاههای تحلیلی اغلب از موتورهای پلهای هیبریدی 35 میلیمتری برای موقعیتیابی دقیق و کنترل حرکت استفاده میکنند. آنها را میتوان در رباتهای آزمایشگاهی، سیستمهای جابجایی مایعات، مکانیسمهای جابجایی نمونه و سایر تجهیزاتی که نیاز به حرکات دقیق و تکرارپذیر دارند، یافت.
سیستمهای نوری:کاربردهای اپتیک و فوتونیک، مانند سیستمهای لیزر، میکروسکوپی، طیفسنجی و سیستمهای تنظیم نوری، از دقت و پایداری بالای ارائه شده توسط موتورهای پلهای هیبریدی 35 میلیمتری بهره میبرند. این موتورها امکان کنترل دقیق اجزای نوری را فراهم میکنند و موقعیتیابی و تنظیم دقیق پرتو را تضمین میکنند.
بستهبندی و برچسبگذاری:ماشینهای بستهبندی و برچسبگذاری برای اطمینان از موقعیتیابی و اعمال دقیق برچسبها، مواد بستهبندی و دربها، به کنترل دقیق حرکت متکی هستند. دقت بالا و تکرارپذیری موتورهای پلهای هیبریدی 35 میلیمتری با پیچ ساچمهای، آنها را برای چنین کاربردهایی مناسب میکند و راندمان بستهبندی و کیفیت محصول را بهبود میبخشد.
تجهیزات نیمه هادی:در صنعت نیمههادیها، موتورهای پلهای هیبریدی بال اسکرو ۳۵ میلیمتری در تجهیزات مختلفی از جمله سیستمهای جابجایی ویفر، ابزارهای بازرسی و دستگاههای لیتوگرافی مورد استفاده قرار میگیرند. این موتورها به حرکت و ترازبندی دقیق مورد نیاز برای فرآیندهای ساخت نیمههادی کمک میکنند.
مزیت
دقت موقعیتیابی بالا:موتورهای پلهای هیبریدی بال اسکرو ۳۵ میلیمتری دقت موقعیتیابی بالایی را ارائه میدهند. سیستم انتقال قدرت بال اسکرو، لقی را کاهش داده و تکرارپذیری عالی را فراهم میکند و به موتور اجازه میدهد تا به طور دقیق به موقعیت مورد نظر برسد. این دقت در کاربردهایی که موقعیتیابی دقیق حیاتی است، ضروری است.
گشتاور خروجی عالی:این موتورها گشتاور خروجی بالایی ارائه میدهند که به آنها امکان میدهد بارهای بزرگتری را هدایت کنند یا حتی با بارهای متغیر، حرکت پایدار را حفظ کنند. مکانیزم پیچ توپی به طور موثری حرکت چرخشی موتور را به حرکت خطی تبدیل میکند و در نتیجه انتقال گشتاور مؤثری را به همراه دارد.
راندمان بالا:موتورهای پلهای به دلیل پاسخگویی و کاراییشان شناخته شدهاند. آنها میتوانند به سرعت به سیگنالهای کنترل پاسخ دهند و بدون نیاز به حسگرهای اضافی یا سیستمهای بازخورد، موقعیتیابی و کنترل حرکت دقیقی را به دست آورند. این کارایی به عملکرد کلی موتور و سیستمی که در آن ادغام شده است، کمک میکند.
لرزش و سر و صدای کم:موتورهای پلهای هیبریدی بال اسکرو ۳۵ میلیمتری معمولاً در حین کار، لرزش و صدای کمی از خود نشان میدهند. این ویژگی به ویژه در کاربردهایی که سطح صدای کم مورد نظر است یا جایی که لرزش میتواند بر عملکرد یا دقت سیستم تأثیر بگذارد، اهمیت دارد.
قابلیت اطمینان و دوام:این موتورها عموماً به دلیل قابلیت اطمینان و دوام بالا شناخته میشوند. سیستم انتقال قدرت پیچ توپی، توزیع بار خوب و طول عمر مفید بیشتری را فراهم میکند و به موتور اجازه میدهد تا در طول کار طولانی مدت و استفاده مکرر، پایداری و قابلیت اطمینان خود را حفظ کند.
اندازه جمع و جور:موتورهای پلهای هیبریدی بال اسکرو ۳۵ میلیمتری با ابعاد جمعوجور خود، میتوانند به راحتی در کاربردهایی با فضای محدود ادغام شوند. آنها عملکرد بالا و کنترل دقیقی را ارائه میدهند و در عین حال فضای کمتری را اشغال میکنند، که آنها را برای کاربردهایی که اندازه یک محدودیت است، مناسب میسازد.
کنترل و عملکرد آسان:موتورهای پلهای رابط کنترلی سادهای ارائه میدهند که امکان عملکرد ساده و ادغام در سیستمهای کنترل مختلف را فراهم میکند. آنها را میتوان به راحتی با استفاده از سیگنالهای پالس و جهت یا الگوریتمهای کنترل پیشرفتهتر، بسته به نیازهای خاص برنامه، کنترل کرد.
الزامات انتخاب موتور:
► جهت حرکت/نصب
► الزامات بار
►الزامات سکته مغزی
► الزامات ماشینکاری نهایی
► الزامات دقیق
►الزامات بازخورد رمزگذار
► الزامات تنظیم دستی
► الزامات زیستمحیطی
کارگاه تولید


پیام خود را برای ما ارسال کنید:
دسته بندی محصولات
-

موتور پلهای هیبریدی نیما ۸ (۲۰ میلیمتری) بال اسکرو ۱...
-

موتور پلهای هیبریدی Nema 23 (57 میلیمتری) با پیچ ساچمهای ...
-

موتور پلهای هیبریدی نیما ۱۷ (۴۲ میلیمتری) با پیچ ساچمهای ...
-

موتور پلهای هیبریدی Nema 34 (86 میلیمتری) با پیچ ساچمهای ...
-

موتور پلهای هیبریدی Nema 11 (28 میلیمتری) با پیچ ساچمهای ...