




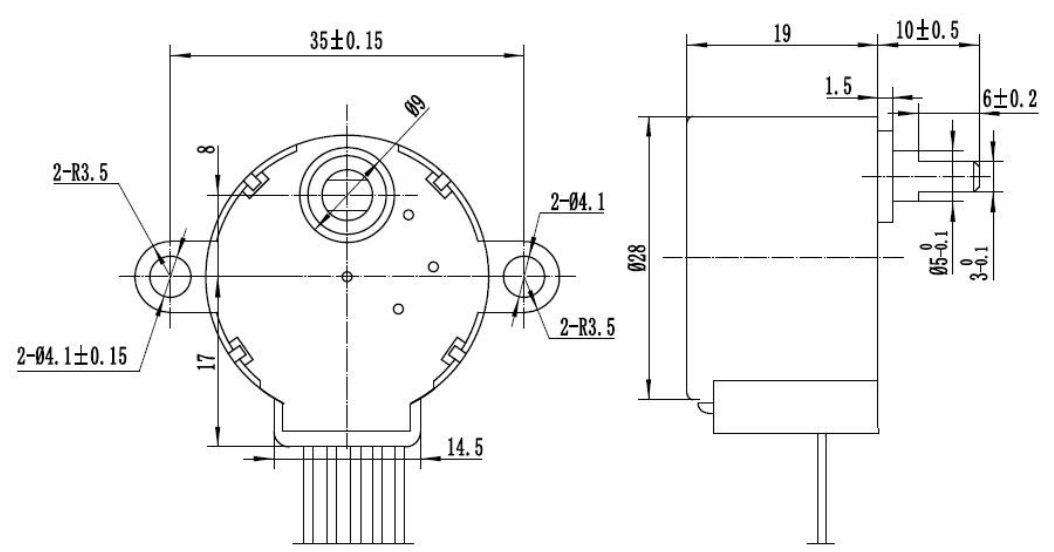
پوشش موتور پلهای گیربکس آهنربای دائمی ۲۸ میلیمتری قابل تنظیم است
توضیحات
این یک موتور پلهای کاهنده PM با قطر 28 میلیمتر است، چرخدنده خروجی با کلاچ اصطکاکی
نسبت دنده این موتور ۱۶:۱، ۲۵:۱، ۳۲:۱، ۴۸.۸:۱، ۶۴:۱، ۸۵:۱ است.
موتور دارای زاویه پله 5.625°/64 است و با تحریک فاز 1-2 یا تحریک فاز 2-2 هدایت میشود.
ولتاژ نامی: 5 ولت DC؛ 12 ولت DC؛ 24 ولت DC
مشخصات سیم اتصال موتور و سیم رابط UL1061 26AWG یا UL2464 26AWG،
این موتور عمدتاً در لوازم بهداشتی، شیر ترموستاتیک، شیر آب گرم، توالت هوشمند، تهویه مطبوع، تنظیم خودکار دما و جریان آب، قفل درب، دستگاه تصفیه آب و یک سری لوازم خانگی استفاده میشود.
همچنین، زمینههای دیگری که نیاز به کنترل دقیق دارند، قابل تحقق هستند. به دلیل تحقق کنترل حلقه باز، کنترل موقعیت کمهزینه محقق میشود.
قیمت این محصول به دلیل تیراژ تولید بالا می تواند کمتر از سایر محصولات باشد.
علاوه بر این، یک چرخدنده روی صفحه دارد، جنس چرخدنده عمومی POM (پلاستیک) است، میتوانیم آن را با یک چرخدنده فلزی نیز جایگزین کنیم، اما این کار هزینه را افزایش میدهد.
اگر به محصولات ما علاقه دارید، میتوانید در هر زمانی با من تماس بگیرید.

پارامترها
| ولتاژ (ولت) | مقاومت(Ω) | گشتاور کششی 100PPS (mN * m) | گشتاور نگهدارنده (mN * m) | فرکانس تخلیه (PPS) |
| 5 | 18 | ≥98 | ≥۲۹.۴ | ≥۵۰۰ |
| 12 | 60 | ≥۱۱۷ | ≥۲۹.۴ | ≥۵۰۰ |
| 12 | 70 | ≥۶۸.۷ | ≥۲۹.۴ | ≥۵۰۰ |
| 24 | ۲۰۰ | ≥۶۸.۷ | ≥۲۹.۴ | ≥۵۰۰ |
| 24 | ۳۰۰ | ≥۵۸.۸ | ≥۲۹.۴ | ≥۵۰۰ |
طراحی طراحی: شفت خروجی قابل تنظیم
ltem های قابل تنظیم
نسبت دنده،
ولتاژ: 5-24 ولت،
جنس چرخ دنده،
شفت خروجی،
طراحی درپوش موتور قابل تنظیم است
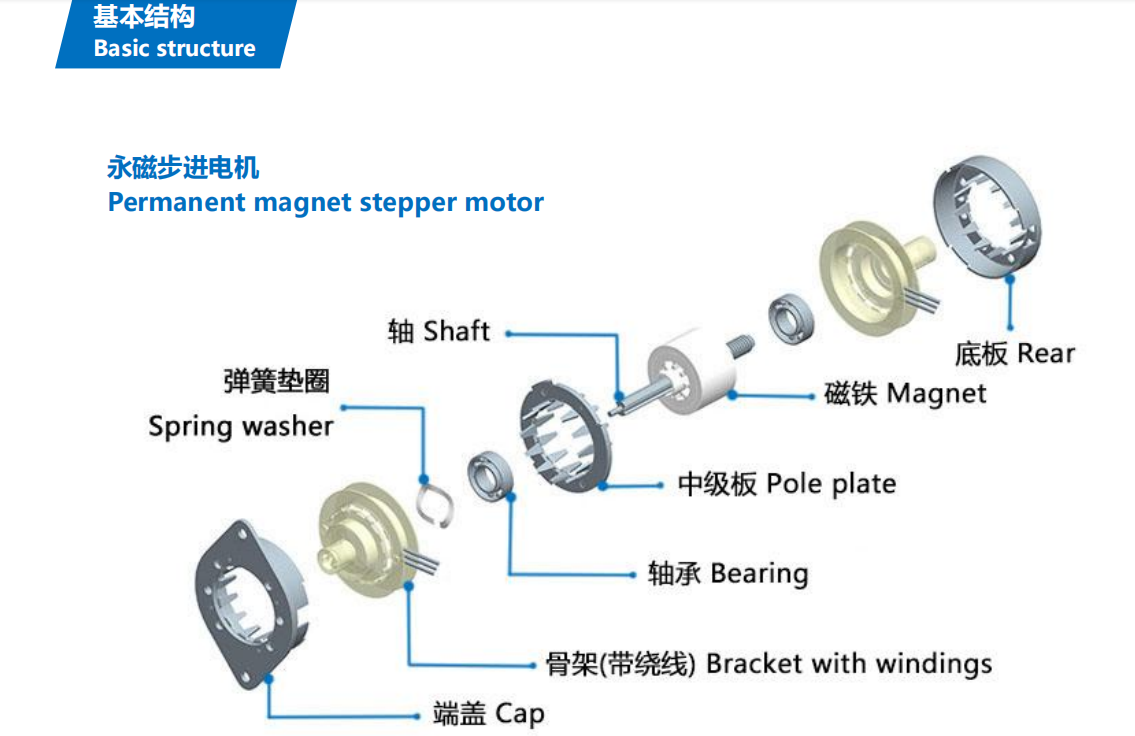
درباره ساختار اساسی موتور پلهای PM
ویژگیها و مزیتها
۱. موقعیتیابی با دقت بالا
از آنجایی که استپرها در مراحل دقیق و قابل تکرار حرکت میکنند، در کاربردهایی که نیاز به دقت دارند، برتری دارند.
موقعیتیابی، بر اساس تعداد گامهایی که موتور حرکت میکند
2. کنترل سرعت با دقت بالا
افزایش دقیق حرکت همچنین امکان کنترل عالی سرعت چرخش را برای فرآیند فراهم میکند.
اتوماسیون و رباتیک. سرعت چرخش با فرکانس پالسها تعیین میشود.
۳. عملکرد مکث و نگهداشتن
با کنترل درایو، موتور عملکرد قفل دارد (جریان از طریق سیمپیچهای موتور وجود دارد، اما
موتور نمیچرخد) و هنوز یک خروجی گشتاور نگهدارنده وجود دارد.
۴. عمر طولانی و تداخل الکترومغناطیسی کم
موتور پلهای جاروبک ندارد و مانند موتور براشلس نیازی به کموتاسیون توسط جاروبکها ندارد.
موتور DC. هیچ اصطکاکی بین جاروبکها وجود ندارد که باعث افزایش طول عمر، عدم جرقه الکتریکی و کاهش تداخل الکترومغناطیسی میشود.
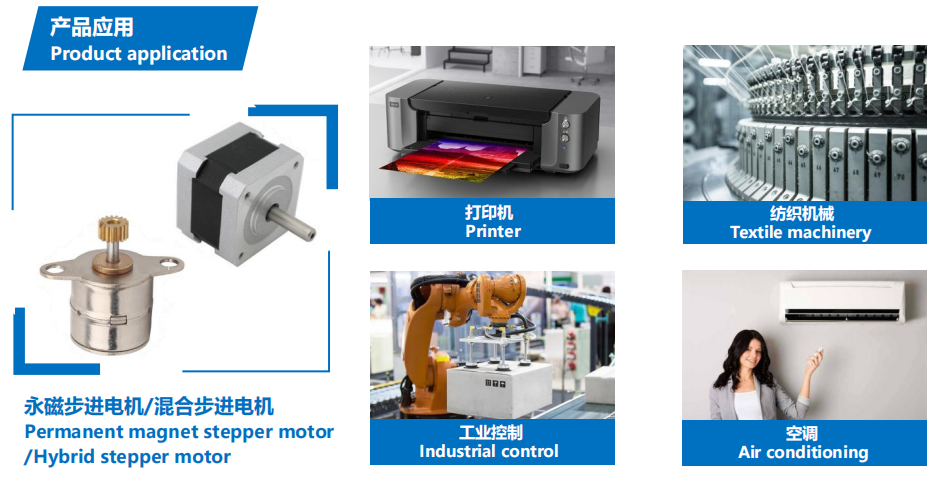
کاربرد موتور پلهای PM
چاپگر،
ماشین آلات نساجی،
کنترل صنعتی،
لوازم بهداشتی،
شیر ترموستاتیک،
شیرهای آب گرم،
تنظیم خودکار دمای آب
قفل درها
تهویه مطبوع
شیر تصفیه آب و غیره
اصول کار موتور پلهای
درایو موتور پلهای توسط نرمافزار کنترل میشود. وقتی موتور نیاز به چرخش دارد، درایو ...
پالسهای موتور پلهای را اعمال کنید. این پالسها به ترتیب مشخصی به موتورهای پلهای انرژی میدهند، در نتیجه
باعث چرخش روتور موتور در جهت مشخص شده (در جهت عقربههای ساعت یا خلاف جهت عقربههای ساعت) میشود.
هر بار که موتور پالسی از درایور دریافت میکند، به اندازه یک زاویه پله (با درایو تمام پله) میچرخد و زاویه چرخش موتور با تعداد پالسهای درایو شده و زاویه پله تعیین میشود.
زمان سرب
اگر نمونه در انبار داشته باشیم، میتوانیم ظرف 3 روز نمونهها را ارسال کنیم.
اگر نمونه در انبار نداشته باشیم، باید آنها را تولید کنیم، زمان تولید حدود 20 روز تقویمی است.
برای تولید انبوه، زمان تحویل به مقدار سفارش بستگی دارد.
بسته بندی
نمونهها در اسفنج فومی با جعبه کاغذی بستهبندی میشوند و توسط اکسپرس ارسال میشوند.
تولید انبوه، موتورها در کارتنهای موجدار با فیلم شفاف در خارج بستهبندی میشوند. (ارسال از طریق هوا)
در صورت ارسال از طریق دریا، محصول روی پالت بسته بندی خواهد شد

روش پرداخت و شرایط پرداخت
برای نمونه، به طور کلی ما پی پال یا علی بابا را می پذیریم.
برای تولید انبوه، پرداخت T/T را میپذیریم.
برای نمونهها، قبل از تولید، کل مبلغ را پرداخت میکنیم.
برای تولید انبوه، میتوانیم ۵۰٪ پیشپرداخت را قبل از تولید بپذیریم و ۵۰٪ مابقی را قبل از ارسال دریافت کنیم.
بعد از اینکه بیش از 6 بار سفارش دادیم، میتوانیم در مورد سایر شرایط پرداخت مانند A/S (پس از مشاهده) مذاکره کنیم.
روش پرداخت و شرایط پرداخت
۱. دلایل استفاده از موتورهای پلهای با گیربکس:
موتور پلهای فرکانس جریان فاز استاتور را تغییر میدهد، مانند تغییر پالس ورودی مدار درایو موتور پلهای، به طوری که به یک حرکت با سرعت کم تبدیل شود. موتور پلهای با سرعت کم در انتظار دستور پلهای است، روتور در حالت توقف قرار دارد، در پلهای با سرعت کم، نوسانات سرعت بسیار زیاد خواهد بود، در این زمان، مانند تغییر به عملکرد با سرعت بالا، میتواند مشکل نوسانات سرعت را حل کند، اما گشتاور ناکافی خواهد بود. یعنی سرعت پایین نوسانات گشتاور را به همراه خواهد داشت و سرعت بالا گشتاور ناکافی خواهد بود، نیاز به استفاده از کاهندهها وجود دارد.




