.jpg)
.jpg)
.jpg)
.jpg)
موتور پلهای هیبریدی Nema 11 (28 میلیمتری)، دوقطبی، 4 سیم، پیچ لید ACME، سر و صدای کم، عمر طولانی، عملکرد بالا.
موتور پلهای هیبریدی Nema 11 (28 میلیمتری)، دوقطبی، 4 سیم، پیچ لید ACME، سر و صدای کم، عمر طولانی، عملکرد بالا.
این موتور پلهای هیبریدی ۲۸ میلیمتری در سه نوع موجود است: محرک خارجی، محور عبوری و محور ثابت عبوری. میتوانید بر اساس نیازهای خاص خود انتخاب کنید.
حداکثر نیروی رانش تا ۲۴۰ کیلوگرم، افزایش دمای پایین، لرزش کم، صدای کم، عمر طولانی (تا ۵ میلیون سیکل) و دقت موقعیتیابی بالا (تا ±۰.۰۱ میلیمتر)
طرح کلی موتور خارجی استاندارد VSM28HSM:
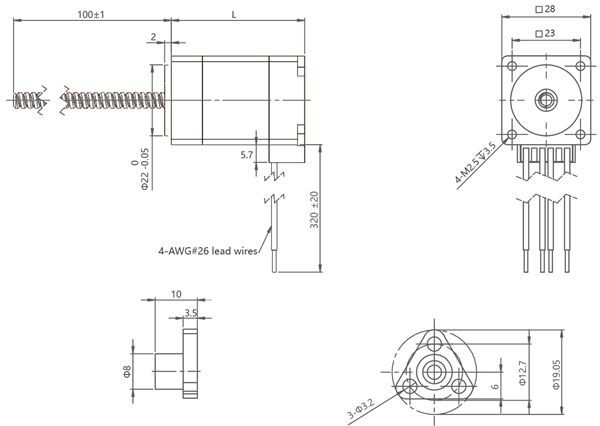
یادداشتها:
طول پیچ سربی قابل تنظیم است
ماشینکاری سفارشی در انتهای لید اسکرو قابل انجام است
توضیحات
| نام محصول | موتورهای پلهای هیبریدی با محرک خارجی ۲۰ میلیمتری |
| مدل | VSM20HSM |
| نوع | موتورهای پلهای هیبریدی |
| زاویه گام | ۱.۸ درجه |
| ولتاژ (ولت) | ۲.۵ / ۶.۳ |
| جریان (A) | ۰.۵ |
| مقاومت (اهم) | ۵.۱ / ۱۲.۵ |
| اندوکتانس (میلیهانری) | ۱.۵ / ۴.۵ |
| سیمهای سربی | 4 |
| گشتاور نگهداشتن (نیوتنمتر) | ۰.۰۲ / ۰.۰۴ |
| طول موتور (میلیمتر) | ۳۰ / ۴۲ |
| دمای محیط | -20℃ ~ +50℃ |
| افزایش دما | حداکثر ۸۰ هزار |
| مقاومت دی الکتریک | حداکثر ۱ میلیآمپر در ۵۰۰ ولت، ۱ کیلوهرتز، ۱ ثانیه |
| مقاومت عایق | حداقل ۱۰۰ مگا اهم @۵۰۰ ولت DC |
گواهینامهها

پارامترهای الکتریکی:
| اندازه موتور | ولتاژ/ فاز (وی) | فعلی/ فاز (الف) | مقاومت/ فاز (Ω) | اندوکتانس/ فاز (میلیهشت) | تعداد سیمهای سربی | اینرسی روتور (گرم بر سانتیمتر مربع)2) | گشتاور نگهدارنده (نیوتون متر) | طول موتور L (میلیمتر) |
| 20 | ۲.۵ | ۰.۵ | ۵.۱ | ۱.۵ | 4 | 2 | ۰.۰۲ | 30 |
| 20 | ۶.۳ | ۰.۵ | ۱۲.۵ | ۴.۵ | 4 | 3 | ۰.۰۴ | 42 |
پارامترهای فنی عمومی:
| فاصله شعاعی | حداکثر 0.02 میلیمتر (بار 450 گرم) | مقاومت عایق | ۱۰۰ مگا اهم @۵۰۰ ولت DC |
| ترخیص محوری | حداکثر 0.08 میلیمتر (بار 450 گرم) | قدرت دی الکتریک | ۵۰۰ ولت AC، ۱ میلی آمپر، ۱ ثانیه @ ۱ کیلوهرتز |
| حداکثر بار شعاعی | ۱۵ نیوتن (۲۰ میلیمتر از سطح فلنج) | کلاس عایق | کلاس ب (۸۰ هزار) |
| حداکثر بار محوری | 5N | دمای محیط | -20℃ ~ +50℃ |
مشخصات پیچ:
| قطر پیچ سربی (میلی متر) | سرب (میلی متر) | گام (میلیمتر) | نیروی قفل خودکار خاموش (N) |
| ۳.۵ | ۰.۶۰۹۶ | ۰.۰۰۳۰۴۸ | 80 |
| ۳.۵ | 1 | ۰.۰۰۵ | 40 |
| ۳.۵ | 2 | ۰.۰۱ | 10 |
| ۳.۵ | 4 | ۰.۰۲ | 1 |
| ۳.۵ | 8 | ۰.۰۴ | 0 |
منحنی گشتاور-فرکانس
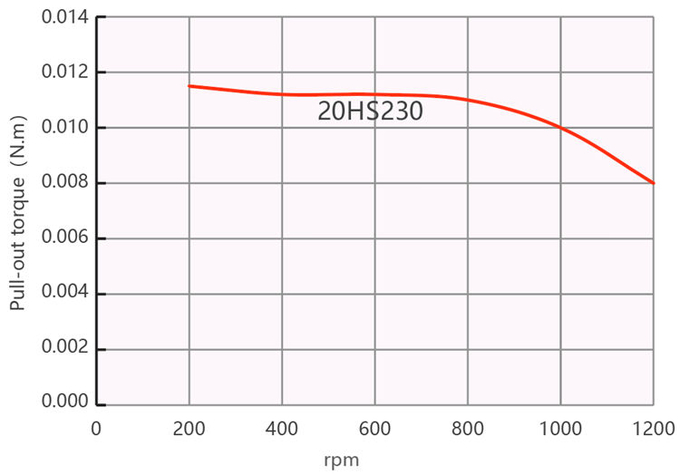
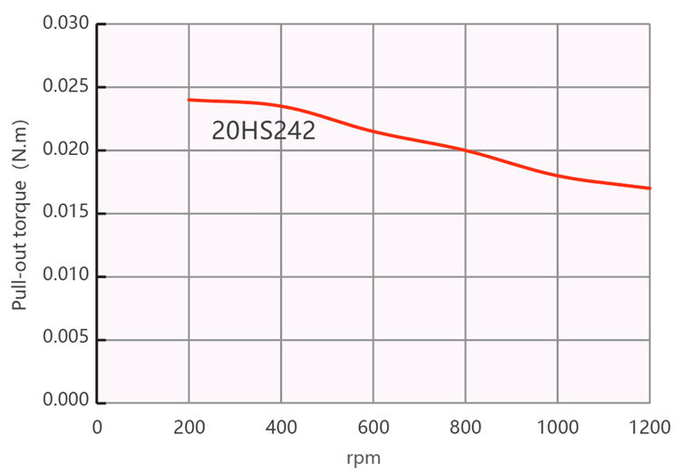
شرایط آزمایش:
درایو چاپر، نیم میکرو پلهای، ولتاژ درایو ۲۴ ولت
زمینههای کاربرد
چاپ سه بعدی:موتورهای پلهای هیبریدی ۲۰ میلیمتری میتوانند برای کنترل حرکت در چاپگرهای سهبعدی برای هدایت هد چاپ، صفحه و سیستم حرکت محوری استفاده شوند.
تجهیزات اتوماسیون: این موتورهای پلهای معمولاً در تجهیزات اتوماسیون مانند ماشینهای بستهبندی اتوماتیک، خطوط مونتاژ اتوماتیک، بازوهای رباتیک جابجایی اتوماتیک و غیره برای کنترل دقیق موقعیت و سرعت استفاده میشوند.
رباتیک:در زمینه رباتیک، از موتورهای پلهای هیبریدی ۲۰ میلیمتری برای کنترل حرکات مفاصل رباتها جهت کنترل دقیق وضعیت و موقعیت استفاده میشود.
ماشینهای ابزار سی ان سی:این موتورهای پلهای همچنین در ماشینهای ابزار CNC برای هدایت حرکات دقیق ابزارها یا میزها برای ماشینکاری با دقت بالا استفاده میشوند.
تجهیزات پزشکی:در تجهیزات پزشکی، میتوان از موتورهای پلهای هیبریدی ۲۰ میلیمتری برای کنترل دقیق حرکت قطعات در تجهیزات پزشکی مانند رباتهای جراحی و سیستمهای دارورسانی استفاده کرد.
تجهیزات خودرو:در صنعت خودرو، از این موتورهای پلهای میتوان برای کنترل موقعیت و حرکت اجزای خودرو مانند سیستمهای بالا و پایین بردن پنجره، سیستمهای تنظیم صندلی و غیره استفاده کرد.
خانه هوشمند:در حوزه خانه هوشمند، موتورهای پلهای هیبریدی ۲۰ میلیمتری میتوانند برای کنترل باز و بسته شدن پردهها، دوربینهای چرخشی در سیستمهای امنیتی خانگی و غیره استفاده شوند.
اینها تنها برخی از زمینههای کاربردی رایج موتورهای پلهای هیبریدی 20 میلیمتری هستند، در واقع، موتورهای پلهای طیف گستردهای از کاربردها را در صنایع و زمینههای مختلف دارند. سناریوهای استفاده خاص نیز به مشخصات، عملکرد و الزامات کنترلی خاص آنها بستگی دارد.
مزیت
دقت و قابلیت موقعیتیابی:موتورهای پلهای هیبریدی دقت و قابلیت موقعیتیابی بالایی را برای حرکات پلهای ظریف، اغلب با زاویههای پلهای کم مانند ۱.۸ درجه یا ۰.۹ درجه ارائه میدهند که منجر به کنترل موقعیت دقیقتر میشود.
گشتاور بالا و سرعت بالا:موتورهای پلهای هیبریدی از نظر ساختاری به گونهای طراحی شدهاند که گشتاور خروجی بالایی را ارائه دهند و با درایور و کنترلکننده مناسب، سرعت بالایی را نیز ارائه دهند. این امر آنها را برای کاربردهایی که به گشتاور بالا و حرکت با سرعت بالا نیاز دارند، مناسب میسازد.
قابلیت کنترل و برنامه ریزی:موتورهای پلهای هیبریدی یک سیستم کنترل حلقه باز با قابلیت کنترل خوب هستند. آنها میتوانند در هر مرحله از حرکت توسط کنترلر به طور دقیق کنترل شوند و در نتیجه توالیهای حرکتی با قابلیت برنامهریزی و کنترل بالا ایجاد کنند.
درایو و کنترل ساده:موتورهای پلهای هیبریدی در مقایسه با سایر انواع موتورها، مدارهای محرک و کنترل نسبتاً سادهای دارند. آنها نیازی به استفاده از دستگاههای بازخورد موقعیت (مثلاً انکودرها) ندارند و میتوانند مستقیماً توسط درایورها و کنترلکنندههای مناسب کنترل شوند. این امر طراحی و نصب سیستم را ساده کرده و هزینهها را کاهش میدهد.
قابلیت اطمینان و پایداری بالا:موتورهای پلهای هیبریدی به دلیل ساختار ساده، تعداد کم قطعات متحرک و طراحی بدون جاروبک، قابلیت اطمینان و پایداری بالایی دارند. آنها نیازی به نگهداری منظم ندارند، عمر طولانی دارند و با استفاده و بهرهبرداری مناسب، عملکرد پایداری را ارائه میدهند.
کم مصرف و کم صدا:موتورهای پلهای هیبریدی از نظر انرژی کارآمد هستند و گشتاور خروجی بالایی را با توان نسبتاً کم ارائه میدهند. علاوه بر این، آنها معمولاً طوری کار میکنند که سطح نویز کمتری تولید کنند و این به آنها در کاربردهای حساس به نویز مزیت میدهد.
الزامات انتخاب موتور:
► جهت حرکت/نصب
► الزامات بار
►الزامات سکته مغزی
► الزامات ماشینکاری نهایی
► الزامات دقیق
►الزامات بازخورد رمزگذار
► الزامات تنظیم دستی
► الزامات زیستمحیطی
کارگاه تولید



-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)